两种液体混合控制
-
1 1 &nbs...
-
2 2 &nbs...
-
3 3 &nbs...
上一节
下一节
任务描述
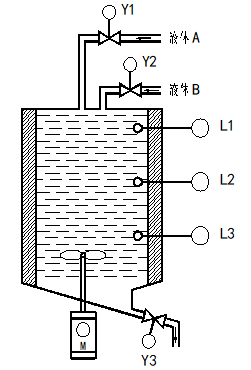
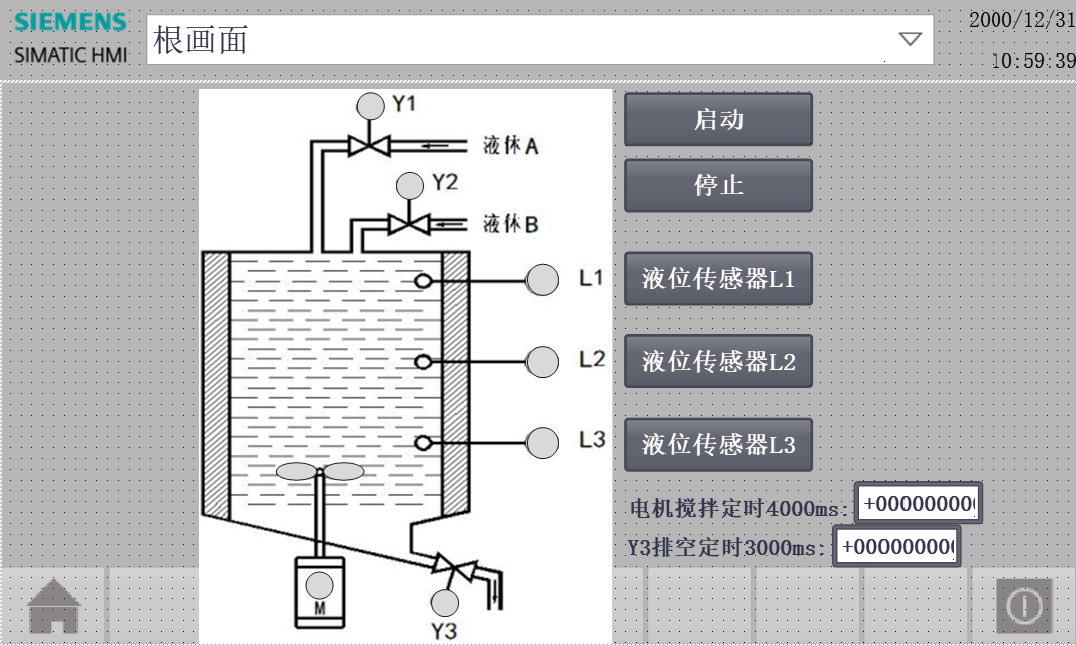
请设计一个如图所示的两种液体混合控制系统,具体的控制要求如下:
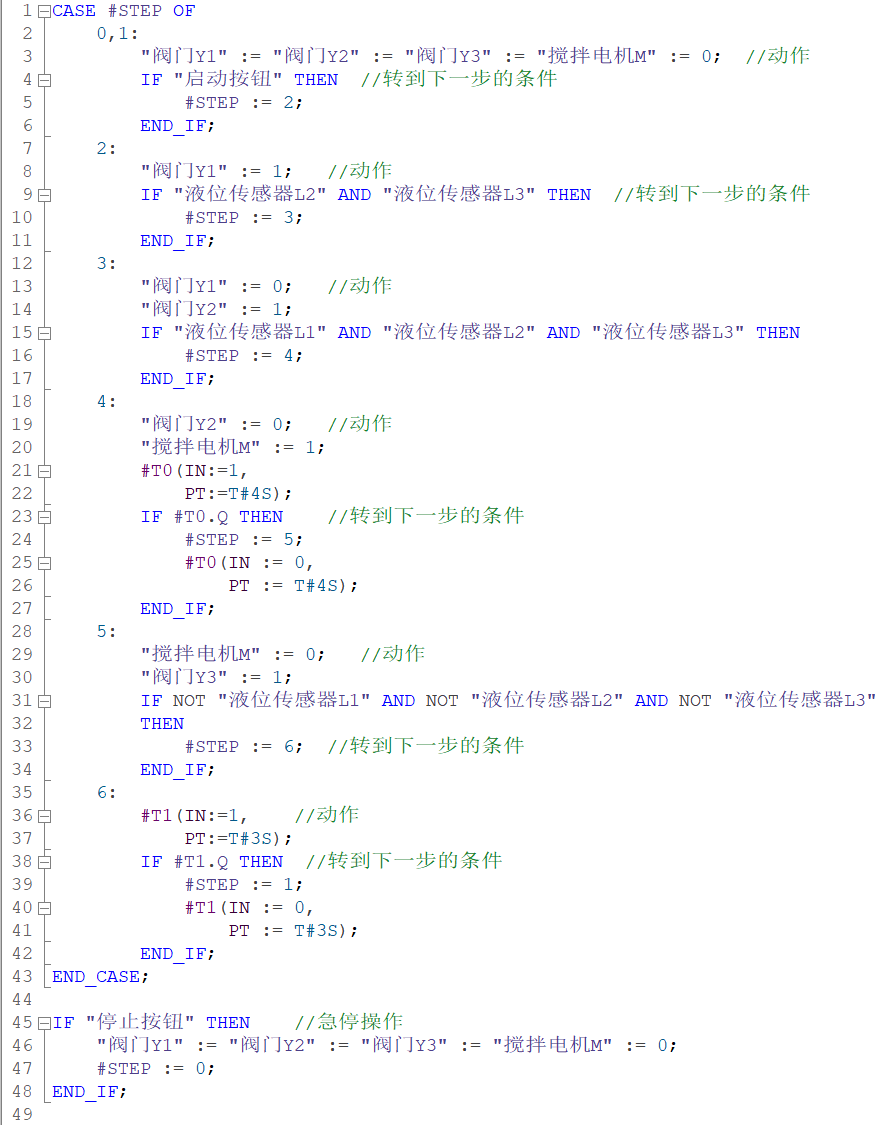
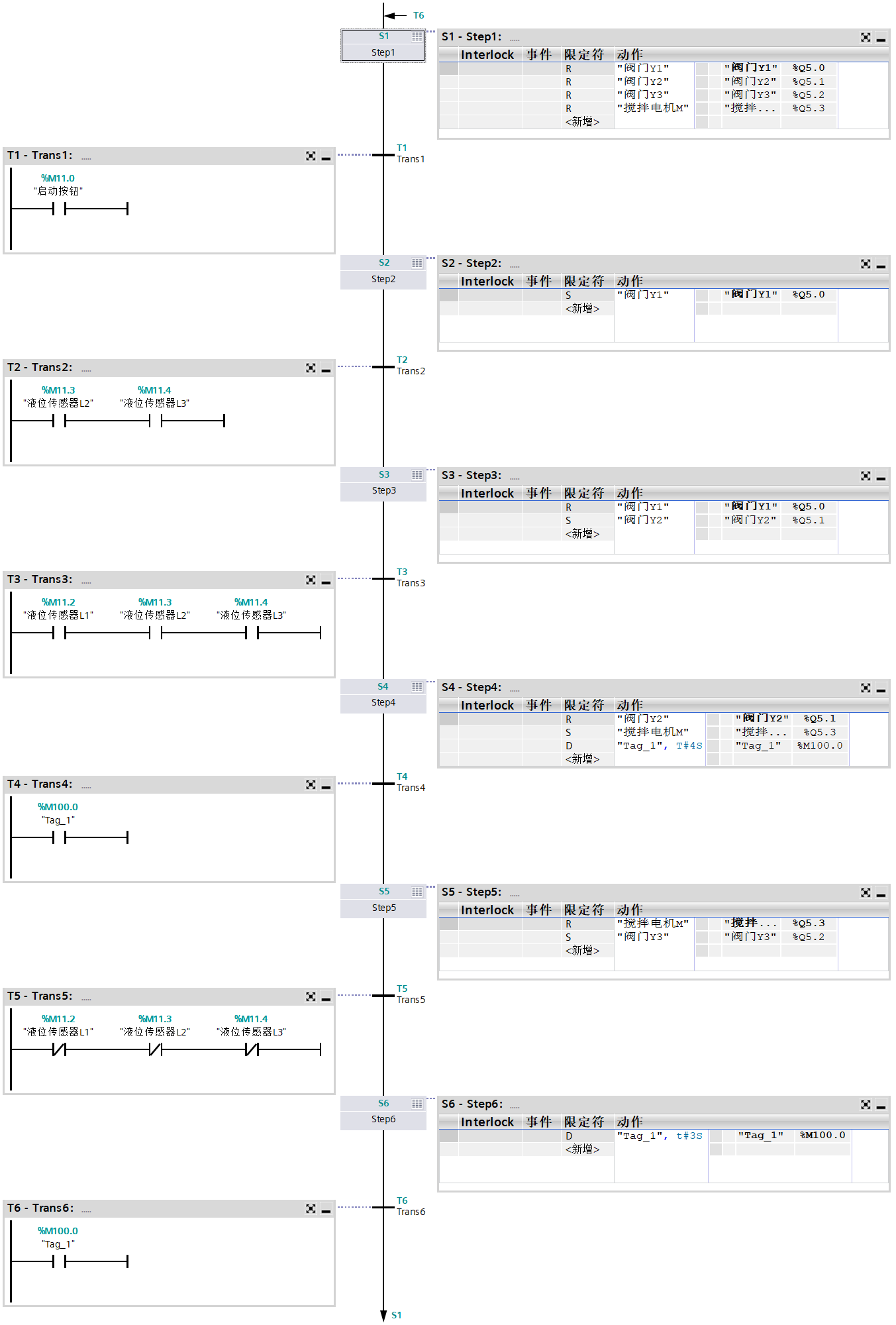
①系统复位状态下,阀门Y1、阀门Y2、阀门Y3都是关闭的,搅拌电机M停止,3个液位传感器L1、L2、L3输出信号均为“0”。
②按下启动按钮后,阀门Y1打开,开始注入液体A。
③当液位传感器L2、L3输出信号为“1”时,表示液体到了L2的高度,这时关闭阀门Y1,停止注入液体A。同时打开阀门Y2,开始注入液体B。
④当液位传感器L1、L2、L3输出信号为“1”时,表示液体到了L1的高度,这时关闭阀门Y2,停止注入液体B。同时开启搅拌电机M,进行搅拌。
⑤搅拌电机M搅拌4s后停止搅拌,这时打开阀门Y3,开始放出液体。
⑥当液位降低至L3时,再延时3s放空液体,然后关闭阀门Y3,一个周期结束,回到系统复位状态。
⑦液体混合过程中,按下停止按扭,直接回到系统复位状态。
有条件的读者,可以参考图 4‑1用实物搭建一个两种液体混合控制系统。如果不具备实物条件,也可以在触摸屏的HMI人机界面中设计一个这样模拟控制系统。
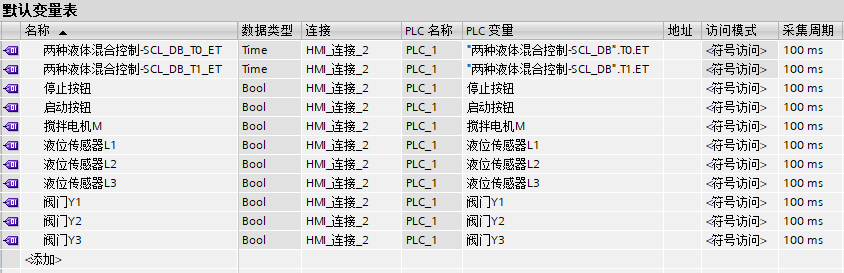
在这个系统中,3个液位传感器L1、L2、L3,可以采用实物开关进行模拟,或者在触摸屏HMI人机界面中用虚拟开关进行模拟。