-
1 1 知识...
-
2 2 知识...
-
3 3 案例

断开延时定时器指令TOF Time
举例

一、步 (S7-1500)
可以使用步将复杂的自动化任务分解成各个明确的子任务并通过步中的动作完成。 然后将各个步加入到顺控程序中,这样每步都可以在程序流中按指定顺序执行。每步都必须分配一个唯一的名称和编号。
为了正确执行,必须使用以下条件之一对步进行激活:
步定义为初始步。
上一个步的转换已完成。
步由事件型动作调用。
一旦所有的操作都已执行完毕,步将再次处于未激活状态。
不设定任何动作的步称之为空步。 这种空步行为方式与活动步类似,且始终满足后续转换条件。
在一个步中可以对以下元素进行编程:互锁条件、监控条件、动作
互锁条件
可以使用互锁对执行各个动作的条件进行编程。 只有在满足互锁条件时,才执行与互锁相关联的步中的动作。 如果不满足互锁条件,则将发生错误。 对于这种情况,可以指定将显示的报警信息。 但该错误不会影响切换到下一步。 此外,还需注意,当步变为不活动状态后,互锁条件将自动取消。 也可以选择指定操作员必须确认互锁条件报警才能关闭该报警。
还可以选择不编程互锁中的任何条件,但仍将动作与互锁相关联。 此时,将始终满足互锁条件。
监控条件
可以使用一个监控条件对可以监控整个步的条件进行编程。 如果满足该条件,则将发生错误,且该步仍然处于活动状态。 也就是说,在这种情况下顺控程序不切换到下一步,而是仍在活动步中,直到错误消除。 也可以为该监控条件的报警信息和强制确认。
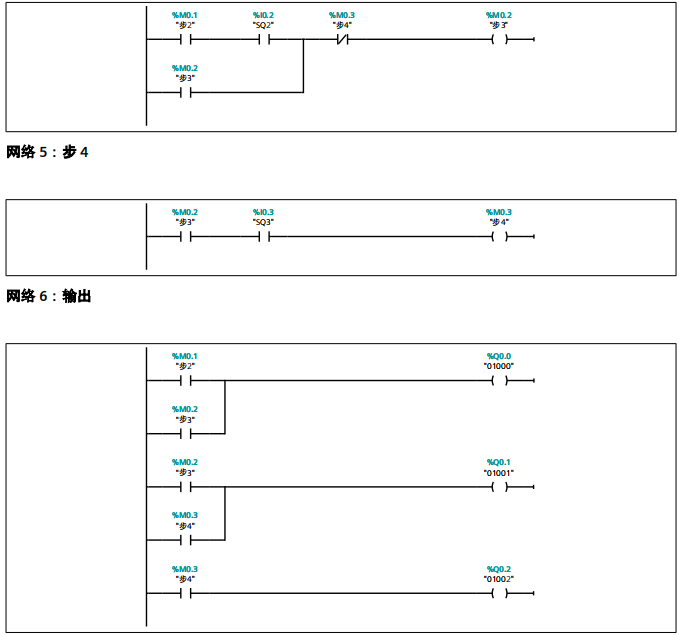
动作
可在步中对动作进行编程。 例如,这些动作可控制输入或输出,激活或禁用顺控程序的其它步,或者调用块。 因此,动作中可包含过程控制的相关指令。
动作可分为标准动作和事件型动作。激活该步后,将执行标准动作。 事件型动作是指与事件相关联的动作。
二、转换条件 (S7-1500)
转换条件位于各个步之间,并包含从一步切换到下一步(步使能)的条件。 如果满足步使能的转换条件,则将激活下一步,并执行其动作。 在 LAD 或 FBD 中,可以对转换条件进行编程。
三、顺序结尾 (S7-1500)
可使用“顺序结尾”结构元素停止一个顺控程序或一个分支。在并行分支中,顺序结尾前必须有一个转换条件。
注意:如果顺控程序的所有分支都以顺序结尾结束,则可以使用“INIT_SQ”参数或“测试”(Testing) 任务卡的“顺序控制”(Sequence control) 面板中的“初始化”(Initialize) 按钮重新开始执行顺控程序。
四、跳转到步 (S7-1500)
可以通过跳转,从 GRAPH 函数块中的任何步开始继续程序执行。 跳转可以插入到主分支或选择分支的末尾,从而激活顺控程序的循环处理。 跳转和跳转目标在顺控程序中用箭头表示,从而可以为跳转目标指定返回转换条件。
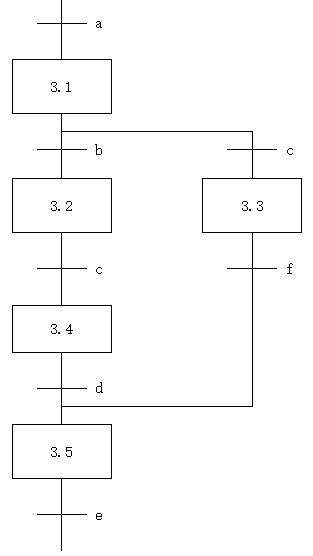
五、选择分支 (S7-1500)
可以使用并行分支编程 OR 分支。这意味着在步后面插入以转换条件开始的分支。 根据最先满足的转换条件,将执行该转换条件所对应的分支。 如果同时满足多个转换条件,则最右边的转换条件的优先级最高,将执行该转换条件所对应的分支。 选择分支将再次以转换条件结束。
在一个顺控程序中,最多可以编写 125 个选择分支。
六、并行分支 (S7-1500)
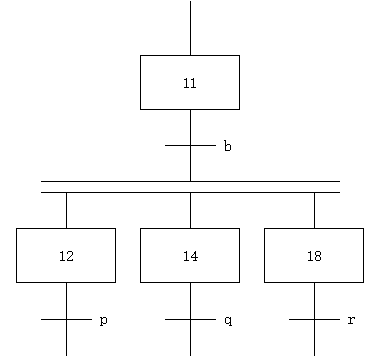
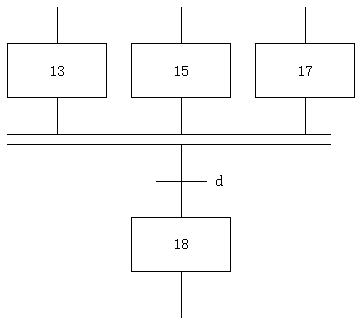
可以使用并行分支编程 AND 分支。 这意味着可以使用一个转换激活多个步,然后执行该步中的动作。并行分支始终从一个步开始。
并行分支的后续转换位于主分支上,此时可将各种并行分支连接到主分支上的不同点。 请注意,只有在执行完所有分支之后,使用一个转换的各个分支才会切换到下一步。
在一个顺控程序中,最多可以编写 249 个并行分支。
七、关闭分支 (S7-1500)
可以使用“关闭分支”元素关闭并行分支和选择分支,返回父分支。如果不希望使用跳转或顺序结尾结束分支,则可使用该元素关闭分支。 在并行分支中,仅可在步后面插入“关闭分支”。
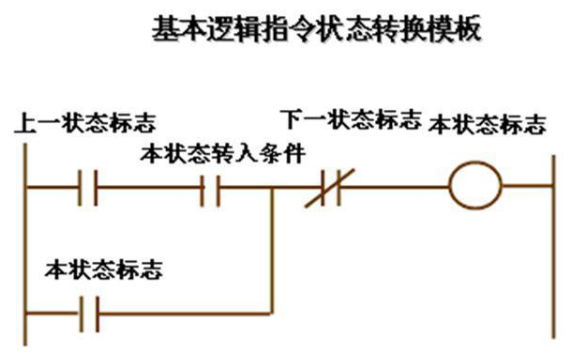
八、步和转换条件 (S7-300, S7-400, S7-1500)
转换条件位于各个步之间,并包含切换到下一步的条件。 也就是说,顺控程序仅在满足转换条件时才会切换到后续步。 在此过程中,要将禁用属于该转换条件中的当前步并激活后续步。 如果不满足条件,则属于该转换条件的当前步将仍处于活动状态。 每个转换条件都必须分配一个唯一的名称和编号。 在 LAD 或 FBD 中,可以对转换条件进行编程。
不含任何条件的转换条件为空转换条件。 在这种情况下,顺控程序将直接切换到后续步。
可以更改转换条件的名称和编号。
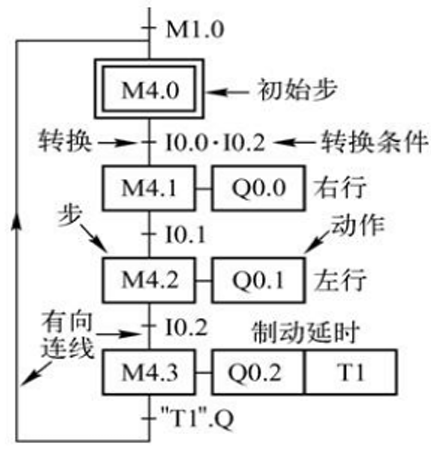
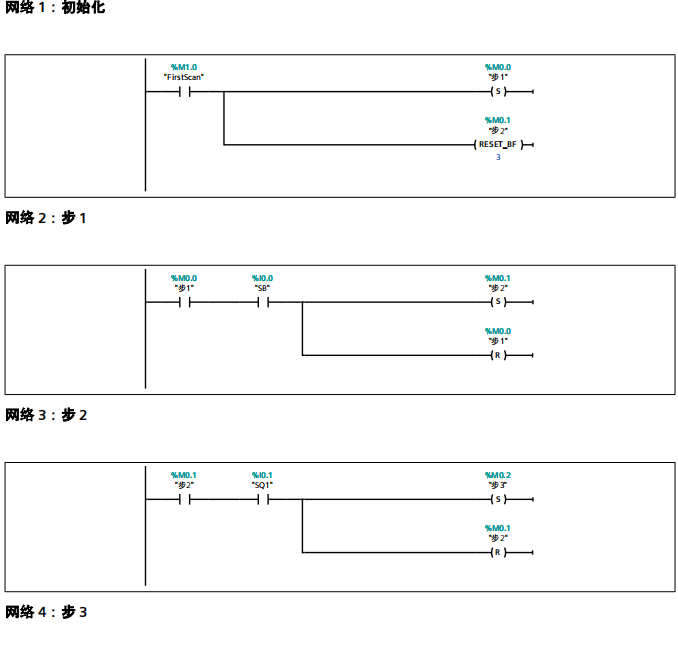
九、顺序功能图的基本结构
1.单序列结构
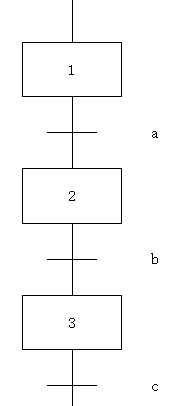
图为单序列结构图
2.选择序列结构(分支、合并)
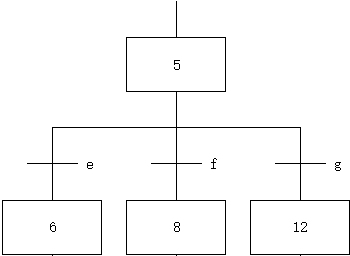
分支
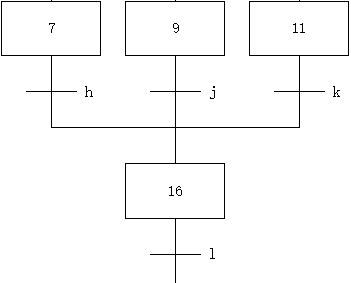
合并
3.并行序列(分支、合并)
分支
合并
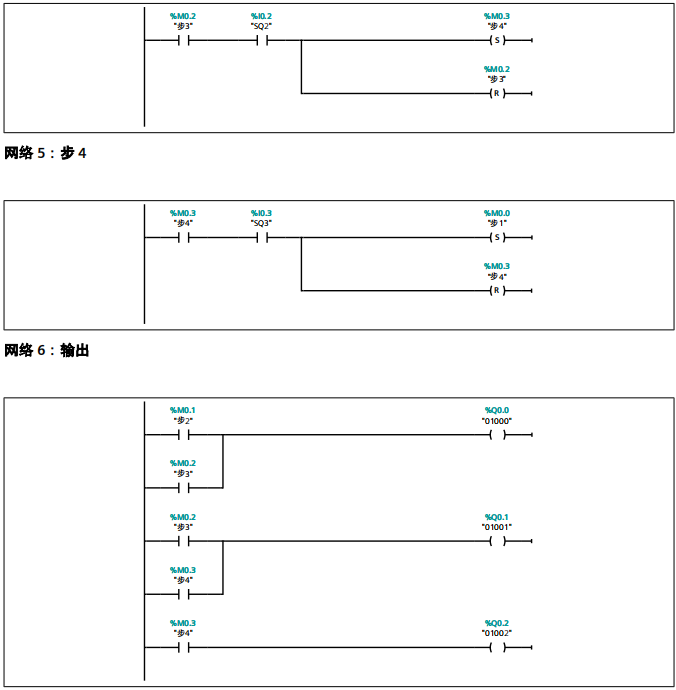
4.有子步序列的结构
注意:两个步绝对不能直接相连,必须用一个转换将它们隔开; 两个转换也不能直接相连,必须用一个步将它们隔开; 初始步对应于系统等待起动的初始状态,初始步是必不可少的; 步和有向连线一般应组成闭环。