连杆机构
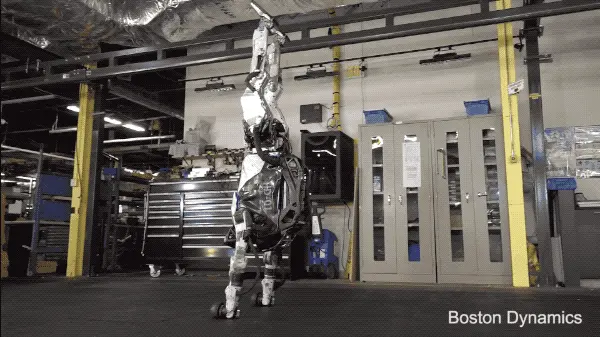
机器人概念已经红红火火好多年了,目前确实有不少公司已经研制出了性能非常优越的机器人产品,我们比较熟悉的可能就是之前波士顿动力的“大狗”和会空翻的机器人了,还有国产宇树科技的机器狗等,这些机器人动作那么敏捷,背后到底隐藏了什么高科技呢,控制技术太过复杂,一般不太容易了解,不过其中的机械原理倒是相对比较简单,大部分都是一些连杆机构。
切比雪夫连杆机构
1、切比雪夫(1821~1894)
俄罗斯数学家、力学家。切比雪夫在概率论、数学分析等领域有重要贡献。在力学方面,他主要从事这些数学问题的应用研究。他在一系列专论中对最佳近似函数进行了解析研究,并把成果用来研究机构理论。他首次解决了直动机构(将旋转运动转化成直线运动的机构)的理论计算方法,并由此创立了机构和机器的理论,提出了有关传动机械的结构公式。他还发明了约40余种机械,制造了有名的步行机(能精确模仿动物走路动作的机器)和计算器,切比雪夫关于机构的两篇著作是发表在1854年的《平行四边形机构的理论》和1869年的 《论平行四边形》。
理论联系实际是切比雪夫科学工作的一个鲜明特点。他自幼就对机械有浓厚的兴趣,在大学时曾选修过机械工程课。就在第一次出访西欧之前,他还担任着彼得堡大学应用知识系(准工程系)的讲师。这次出访归来不久,他就被选为科学院应用数学部主席,这个位置直到他去世后才由李雅普诺夫接任。应用函数逼近论的理论与算法于机器设计,切比雪夫得到了许多有用的结果,它们包括直动机的理论、连续运动变为脉冲运动的理论、最简平行四边形法则、绞链杠杆体系成为机械的条件、三绞链四环节连杆的运动定理、离心控制器原理等等。他还亲自设计与制造机器。据统计,他一生共设计了40余种机器和80余种这些机器的变种,其中有可以模仿动物行走的步行机,有可以自动变换船桨入水和出水角度的划船机,有可以度量大圆弧曲率并实际绘出大圆弧的曲线规,还有压力机、筛分机、选种机、自动椅和不同类型的手摇计算机。他的许多新发明曾在1878年的巴黎博览会和1893年的芝加哥博览会上展出,一些展品至今仍被保存在苏联科学院数学研究所、莫斯科历史博物馆和巴黎艺术学院里。
2、切比雪夫连杆机构
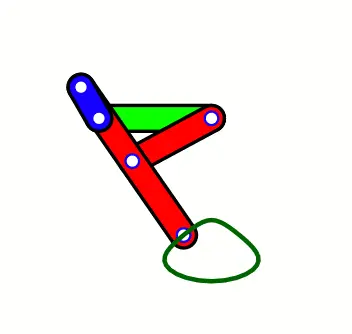
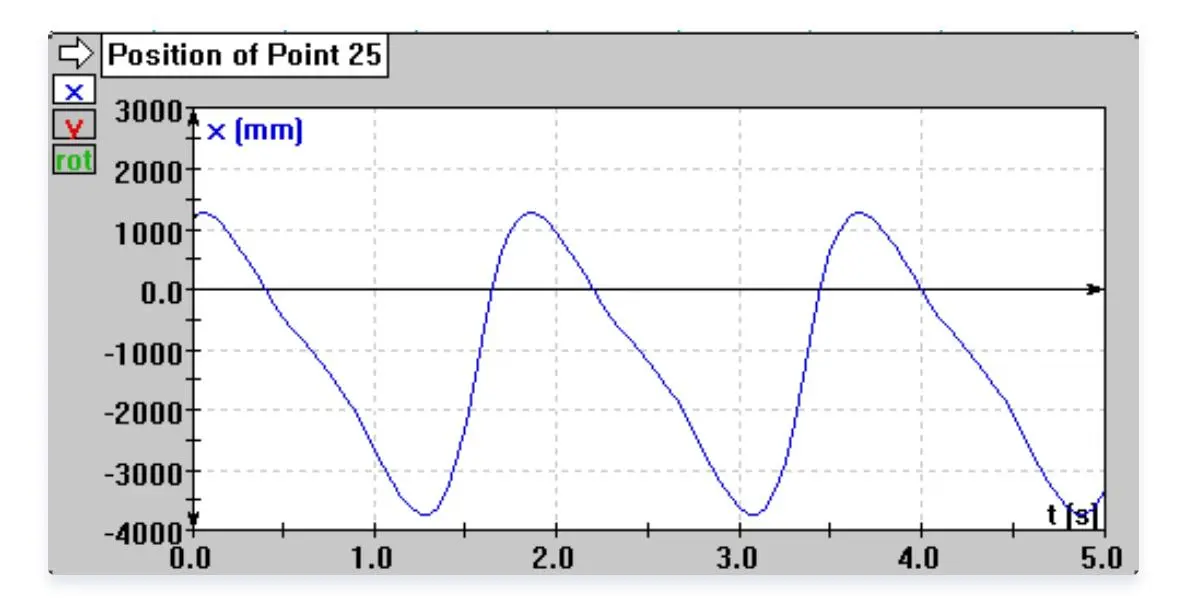
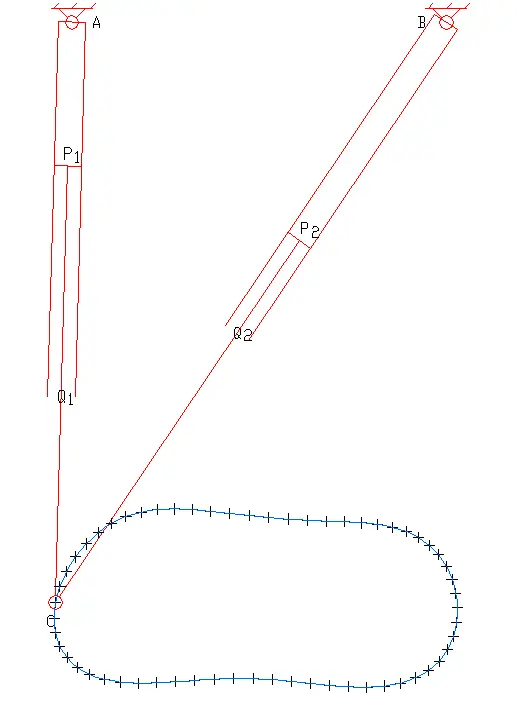
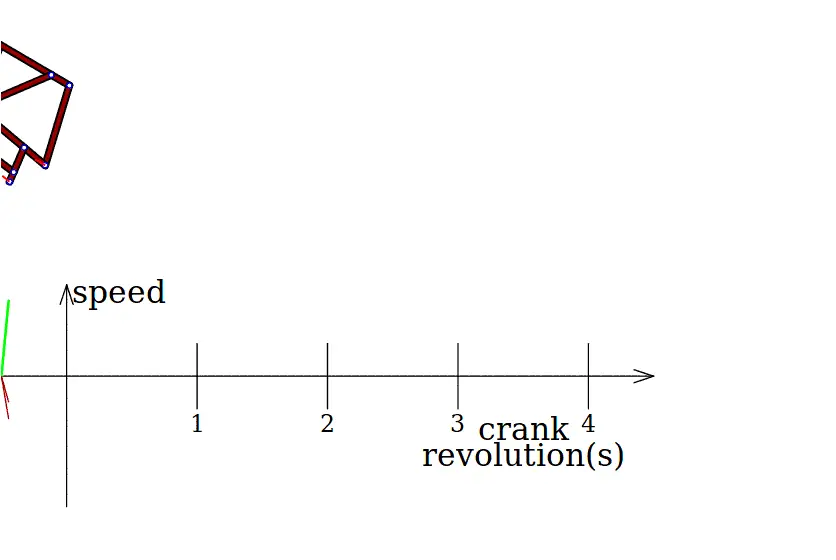
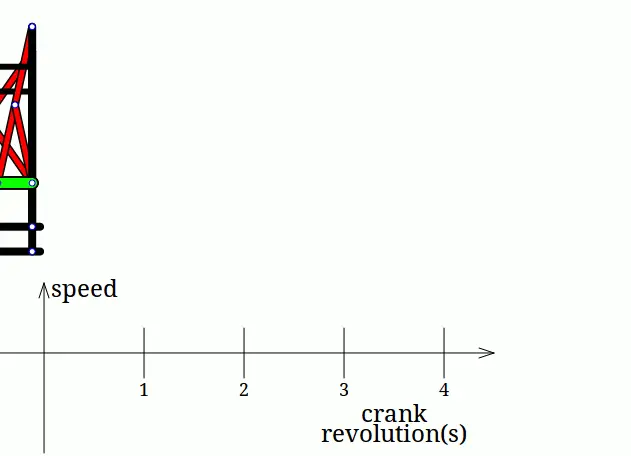
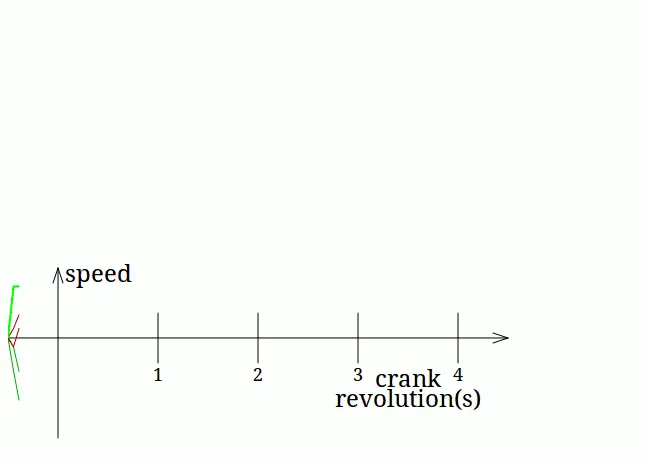
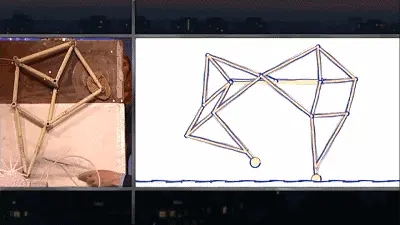
切比雪夫连杆机构被广泛运用在机器人步态模拟上,从动图上也能看出,它的轨迹底部较为平稳,步态方式非常像四足动物,收腿动作有急回特性。根据下图WORKING MODEL仿真分析可得,在X轴上,也能看出它的急回特点。
3、使用切比雪夫连杆机构的机械


克兰连杆机构
1.单个克兰连杆机构
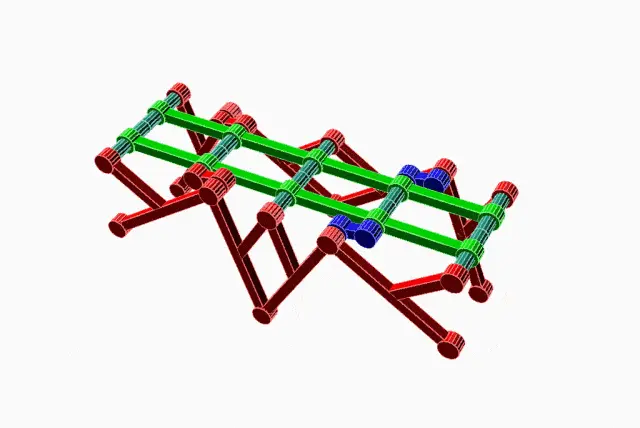
2、四腿行走机构(四个克兰机构)
3.六腿行走机构(六个克兰机构)

RPRPR支腿机构
Tokyo Institute of Technology支腿机构
缩放腿机构
八杆腿机构
Trotbot腿机构
Plantigrade腿机构
Ghassaei行走机构
4腿
6腿
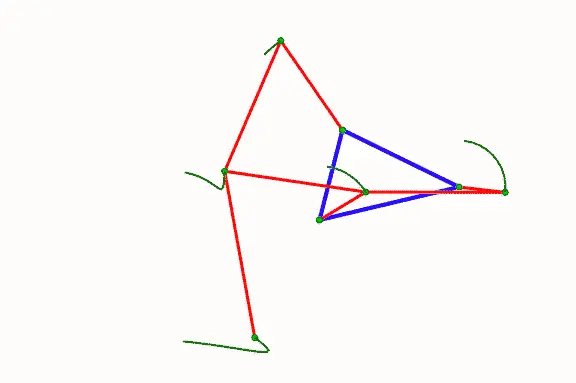
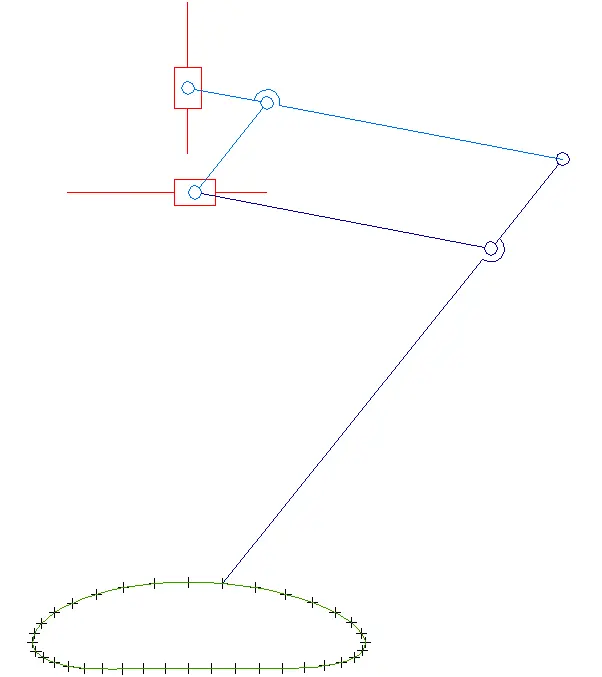
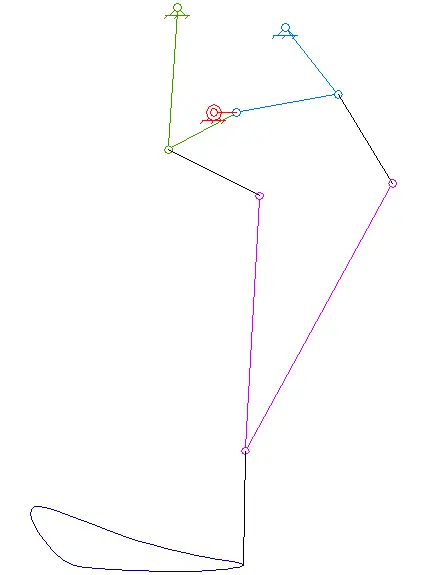
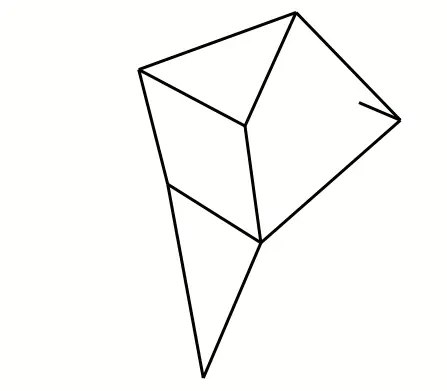
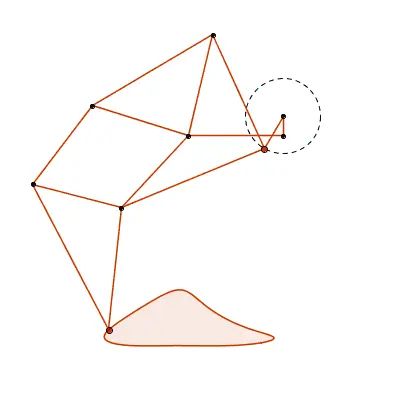
Jansen 连杆机构
是由Jansen发明的,用于模拟平稳行走,Jansen利用这种连杆制造了著名的海滩巨兽,这种连杆兼具美学价值和技术优势,通过简单的旋转输入就可模仿生物行走运动,这种连杆已经用于行走机器人和步态分析。图为单个Jansen 连杆机构。
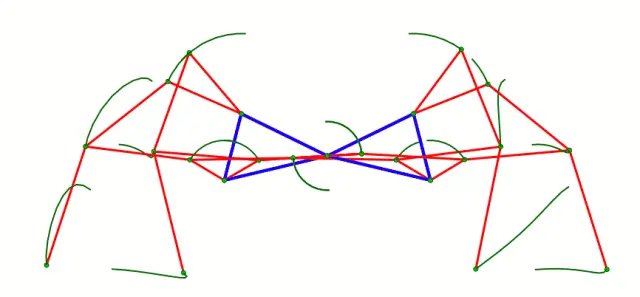
2腿Jansen行走机构
4腿Jansen行走机构

6腿Jansen行走机构
杨森(Theo Jansen)

出生于1948年,荷兰动能艺术家。杨森求学于代尔夫特理工大学物理系,后转为学习绘画。20世纪80年代因“飞行UFO项目”成名。20世纪90年代开始“海滩野兽”系列动能艺术项目,在世界各地做展。杨森上世纪70年代毕业于荷兰的代尔夫特理工大学物理系。那时正值“嬉皮士年代”,深受嬉皮士文化影响的严森开始转行学习艺术。20世纪80年代末,他开始给一家杂志社写专栏,每天都要尝试用不同的眼光来看待世界,寻找看现实的新颖的角度。“海滩怪兽”最初就出现在他的笔下。他构思了这样一个动物,一个能够在海滩上独立生存的简单“生物”。对于“海滩怪兽”,严森最初的想法是建造一些能够采集沙子,搭建沙丘的机器人,这样,当海平面上升时,这些机器人就可以拯救人类不被海水淹没。半年后,他开始利用塑料管建造这些“怪兽”。
杨森采用平凡的PVC等材料,通过精确运算,近30年,几乎以一己之力,在荷兰海边反复实验,创造出自行扑食、运动的新生命体。他的行动呈现出个体的想象力与可能性。科学的艺术性,感性与理性的均衡。引发人们重新反思对恒心,或者说对意义与生命和时间的理解。也对已有的知识和概念提供了革命性的新视角。对于生物学、宗教和艺术都拓展出新的疆域。对于如何作出生活选择、理解自我和自然、衡量追求理想的心态等处世态度,做出了具有启示性的贡献。
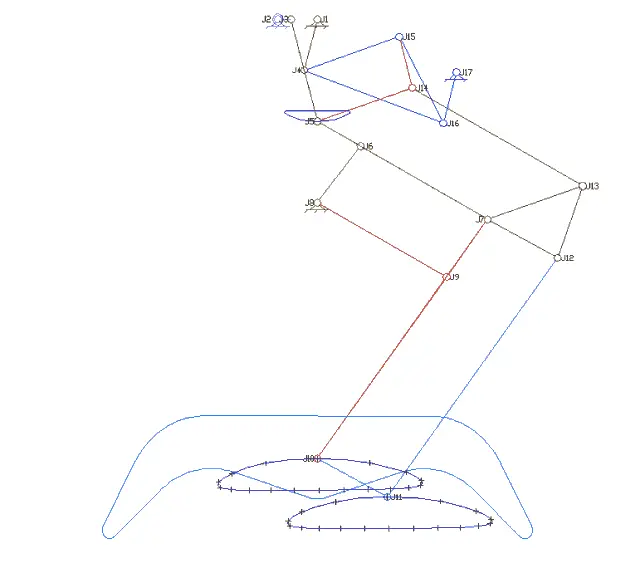
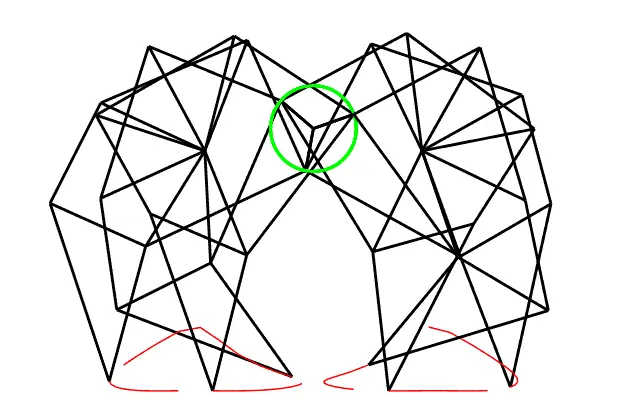
荷兰海滩怪兽的Jansen行走机构





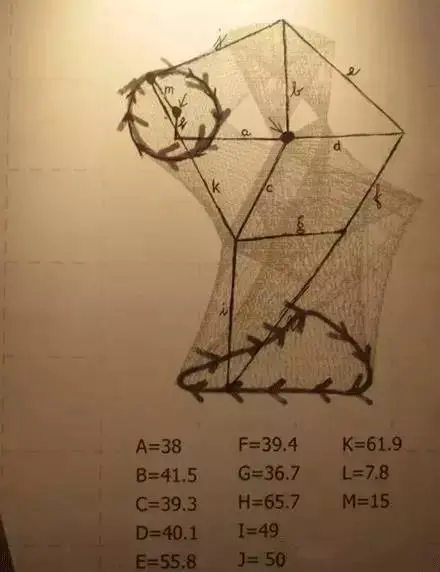
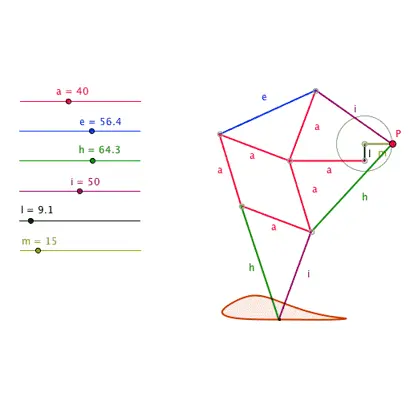
Theo Jansen发明的海滩怪兽身上最重要的部位,就是它们的“仿生腿”(Jansen 连杆机构)。在经历过无数次对动物的行走姿态观察,与上万次的电脑测算之后,泰奥·杨森终于找到了一个最优的方案,让这些软管构架起来的怪兽腿部,可以以最高效的姿态模仿动物的腿部进行行走。这样的“仿生腿”,最重要的是要确保最下端的足部,在行走的环节保持相当长一段时间的匀速直线。
每一只“仿生腿”,都又是利用了基本的三角桁架结构,还有黄金比例的几何学。
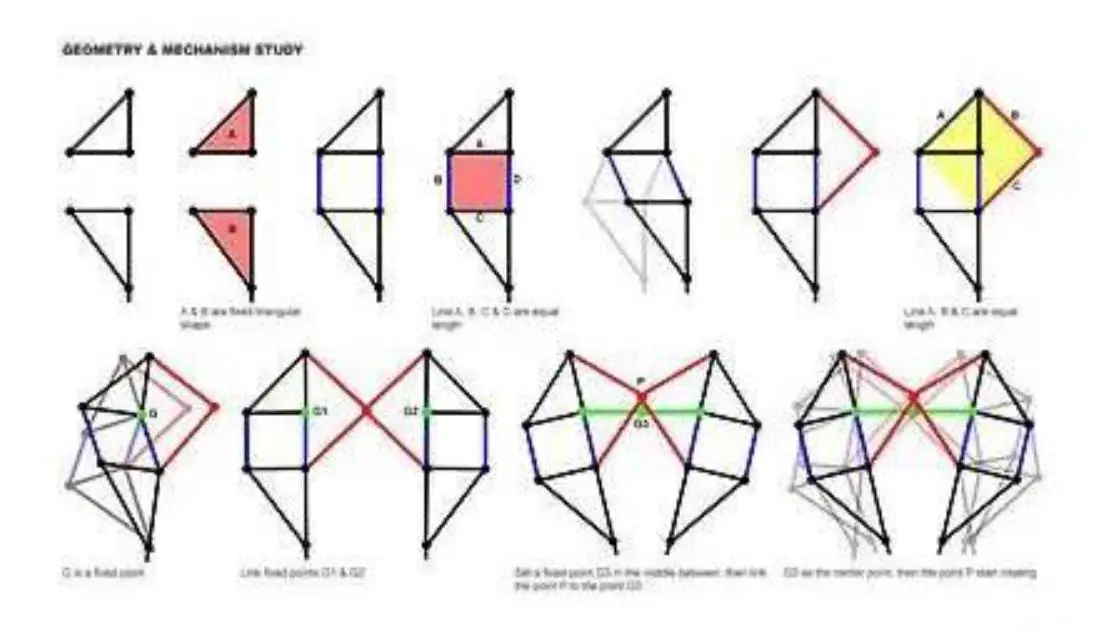
泰奥·扬森把实验后所得的比例称为“13个神圣数字”。而这13这个数值指的就是脚上每个关节骨架的长度,他们之间相对应的比例关係让整体行动起来流畅自如。