辅导功课 VS 监督学习
• 要有许多习题集 • 要有许多“样本”
• 要有答案 • 每个样本要有明确“答案” • 犯错会被“吼” • 犯错会被“惩罚”
• 多次练习直至不再犯错 • 多次练习直至不再犯错
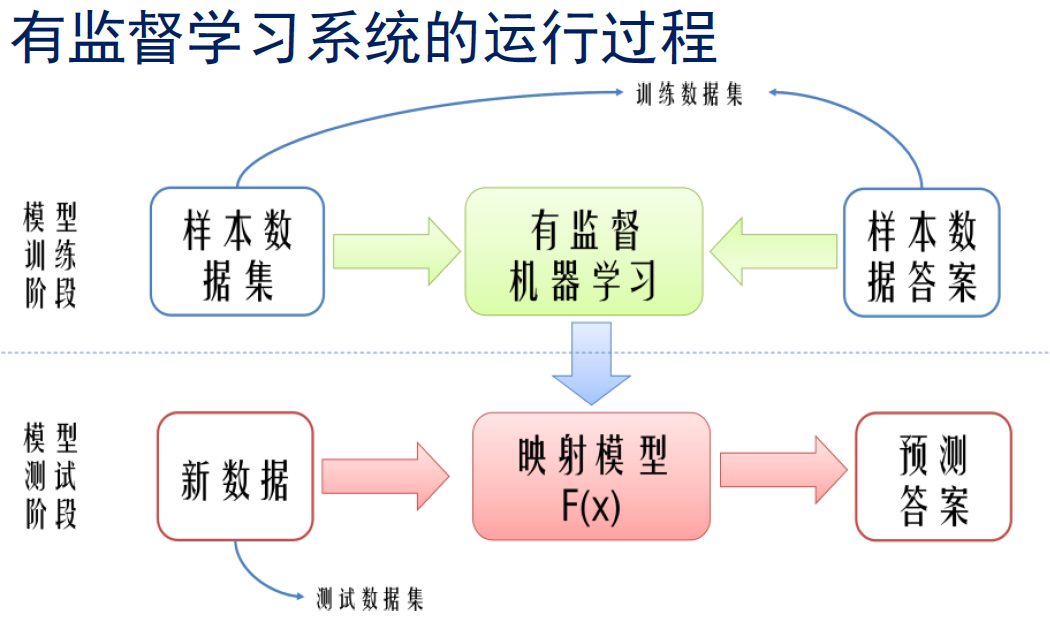
有监督机器学习的基本框架
有监督机器学习的典型方法
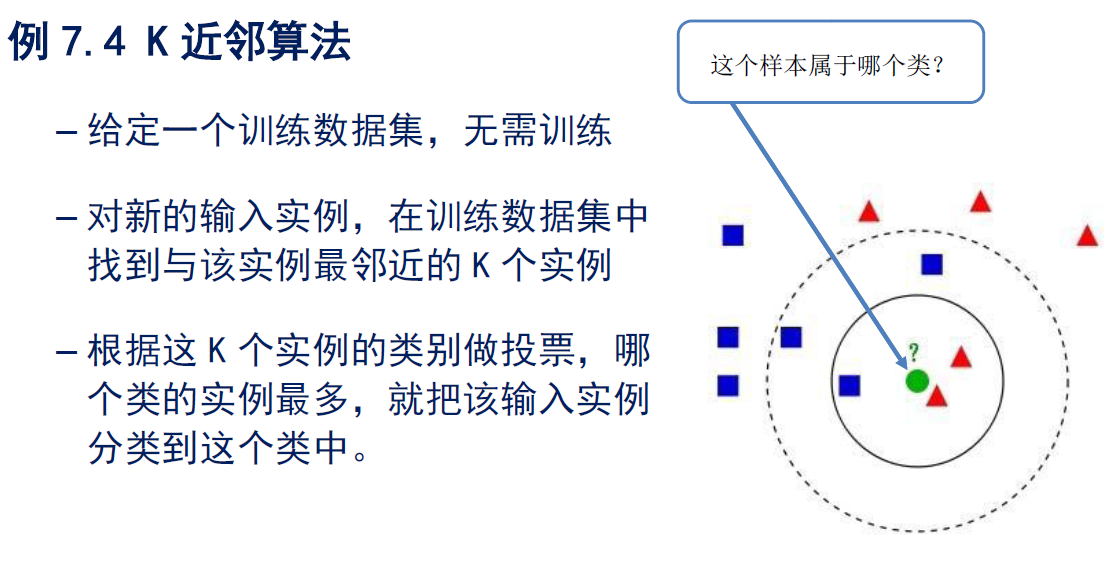
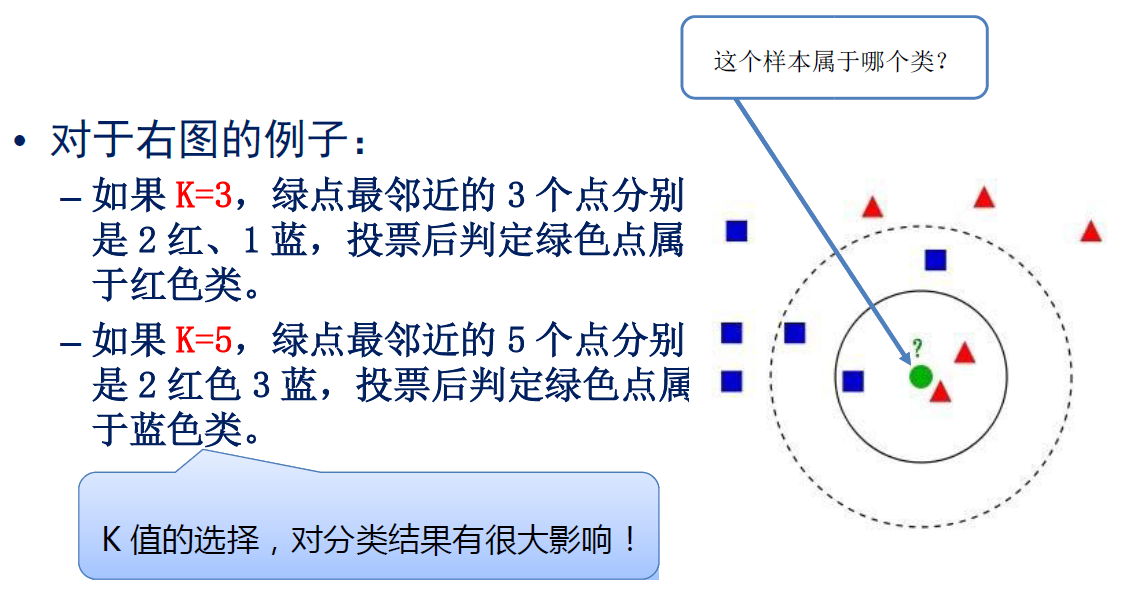
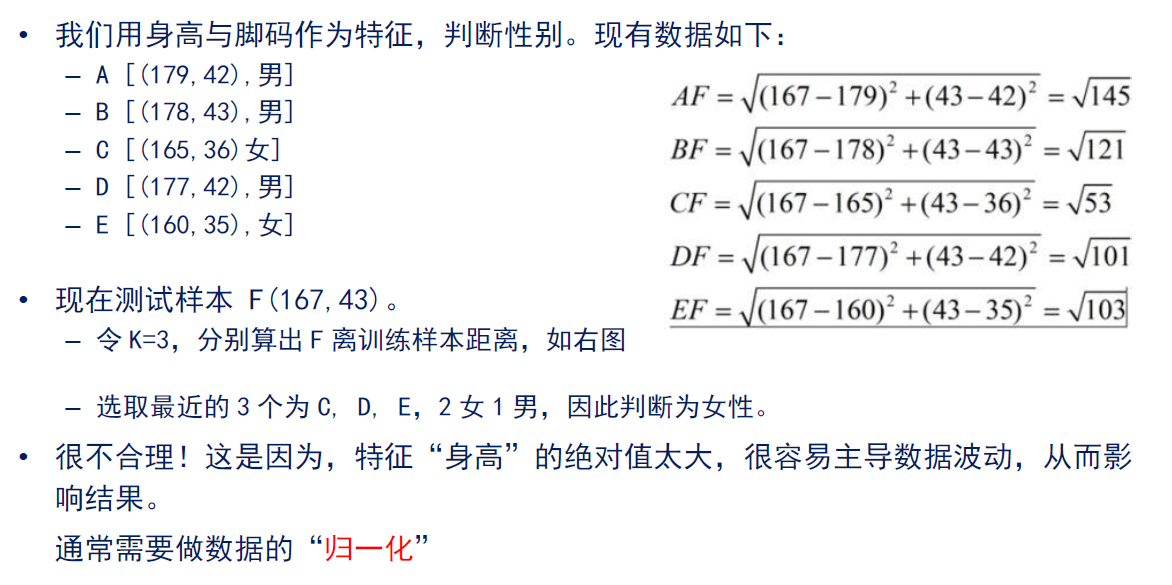
K近邻算法
决策树算法
支持向量机
有监督机器学习的数学描述
– 给定一些训练样本:{(xi,yi), 1<i<N};
– 其中xi 是输入,yi 是需要预测的目标,
– 计算机自动寻找一个决策函数f(·) 来建立x 和y 之间的关系:
yˆ = f (φ(x),θ),
其中:φ是一种函数变换,θ是模型参数
– 选取参数 θ 使得 yˆ 与预测目标 y 之间的差别尽可能小
例7.5 决策树算法
• 很多情况下我们的样本是下面这样的表格统计数据。
• 如何从中归纳出规律?如何根据新的数据快速判断结论? 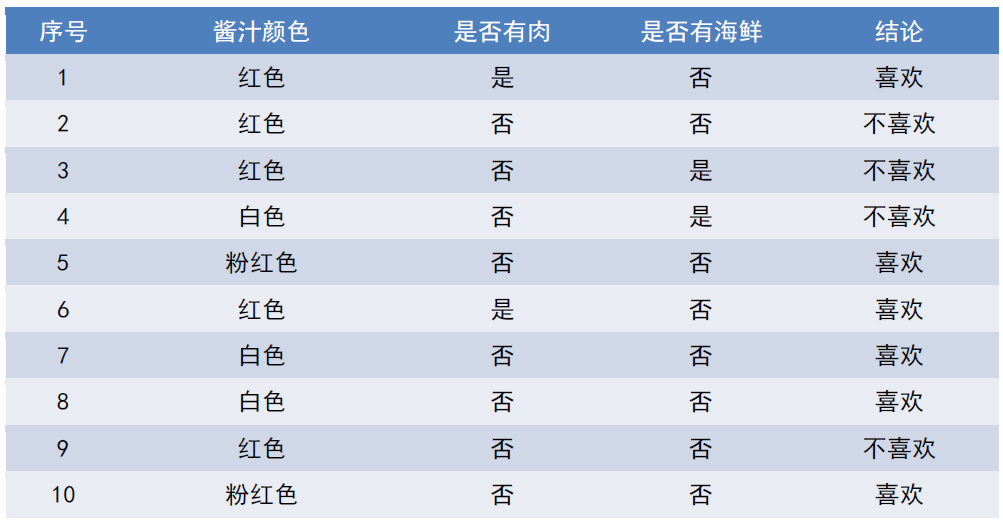
规则归纳问题,适合用决策树来表示,如意大利面决策树。
• 关键问题是:如何从表格构建出这样的决策树?
• 换言之:如何选择各个属性决策的顺序?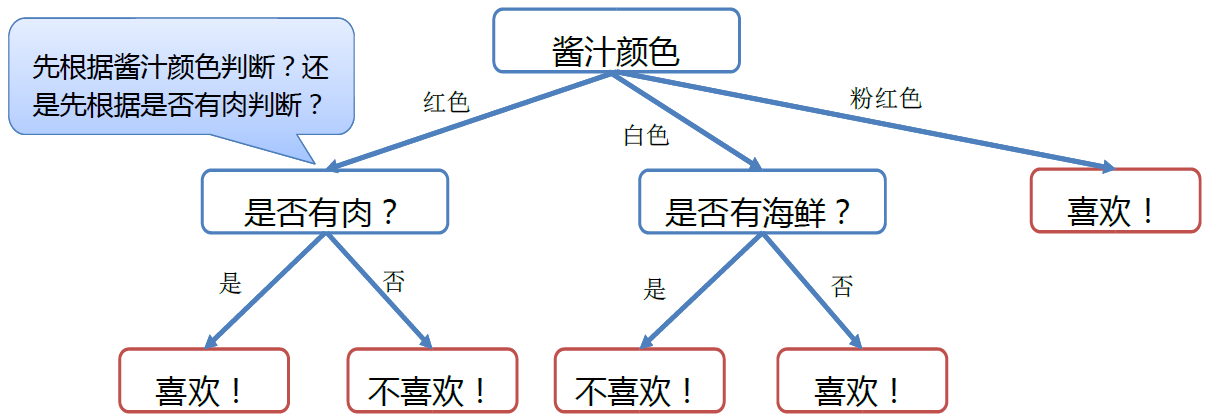
ID3 算法,昆兰(Quinlan,1986)
• 算法思想:
– 属性在决策树中的位置不同,决策树的效率是不同的。
– 如果一个属性对于所有样本都没有区分能力(比如有是否能吃这个属性),那么对于决策毫无用处。
– 如果一个属性恰好能将样本数据一分为二,则这是一个好的属性,应该尽量在决策早期就使用。
– 如果根据一个属性做判断,样本仍然有若干种情况,则该属性不应该出现在决策早期。
– 昆兰提出利用“信息增益”来对属性进行排序。
– 如果一个属性执行后,使得数据集上的信息增益最大(最有序),则该属性应该优先被执行(更接近根节点)。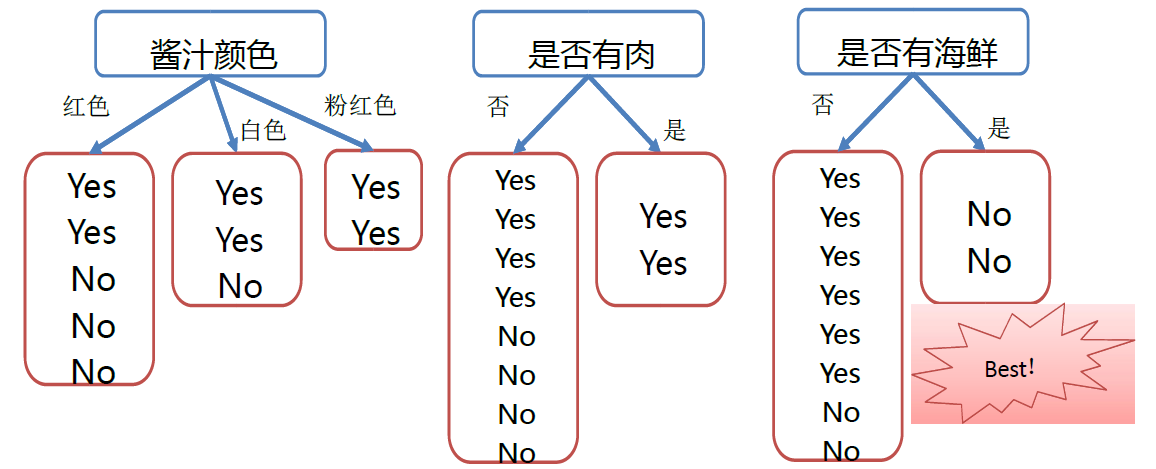
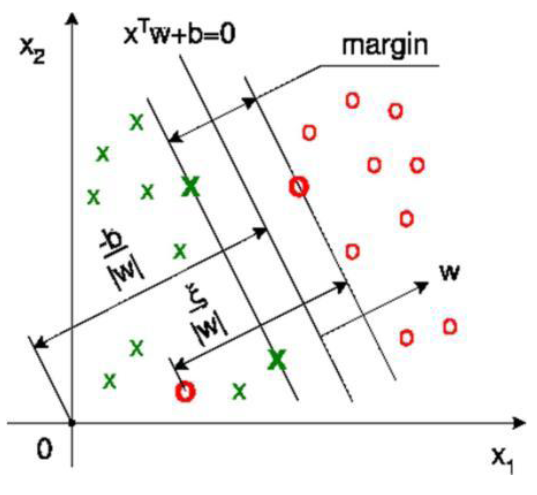
例7.6 支持向量机模型(SVM)
–1967年,俄罗斯数学家Vapnik等人提出最大间隔超平面的思想
–1992年,Boser将核方法应用于最大间隔超平面
–1995年,Corinna Cortes和Vapnik 提出使用“软间隔”思想
–机器学习领域大名鼎鼎,直接导致
2000年代统计机器学习的繁荣。
基本思想
– 对于二分类问题,将样本数据表示为空间中的点。
– 使用“平面”来切割空间,实现分类。
– 如何选择“平面”,成为关键问题。
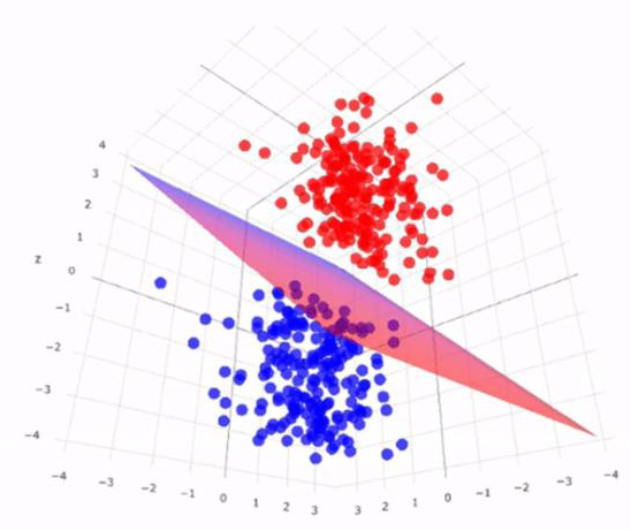
我们认为,一个样本点与分割平面的距离越远,则分类越明确。
– 如果我们能找到一个平面,使得在其两侧,两类样本之间的间隔尽可能大,则该平面就是优秀的分割平面。
– 为达到间隔最大的目标,只需要看距离平面最近的几个样本,它们代表着间隔。称为“支持向量”。