单智能体智能
• 我们知道,人工智能研究的核心理念是“模拟智能活动的特征和结果”。到目前为之,我们所讨论的方法,都是模拟“单一”智能体的智能活动。
• 比如我们所介绍的自动推理、知识图谱、搜索技术,实际上是受到人类智能现象的启发,建立计算模型来模拟一个人如何总结知识、如何进行推理,如何求解问题。
适合生存:物种的智能活动
• 而我们今天要介绍的进化智能和群体智能,则是从自然界中适者生存的客观规律中获得启发。
• 在自然界中,物种在时间和空间上通过调整自身行为、属性来适应环境,使整个物种生存并且不断发展、延续。
• 如果我们将一个“物种”作为整体,那么物种的适应环境、优化自身的能力是否是智能的?
适合生存:物种的智能活动
• 关于这个问题,图灵在1950年曾提出一种观点,认为:智能的本质是系统调整自身行为来适应不断变化的环境的能力,而与系统的形态、外观没有关系。
• 以图灵的观点来看,物种的“适者生存”显然是一种智能活动。
实际上,人类的智能也是物种不断进化和发展的产物。
• 因此,模拟物种“适者生存”的能力,同样属于人工智能的研究范畴。
对物种适者生存能力的解读,可以分时间和空间两个维度来考虑,由此分别产生以下两个研究分支:
“进化智能” “群体智能”
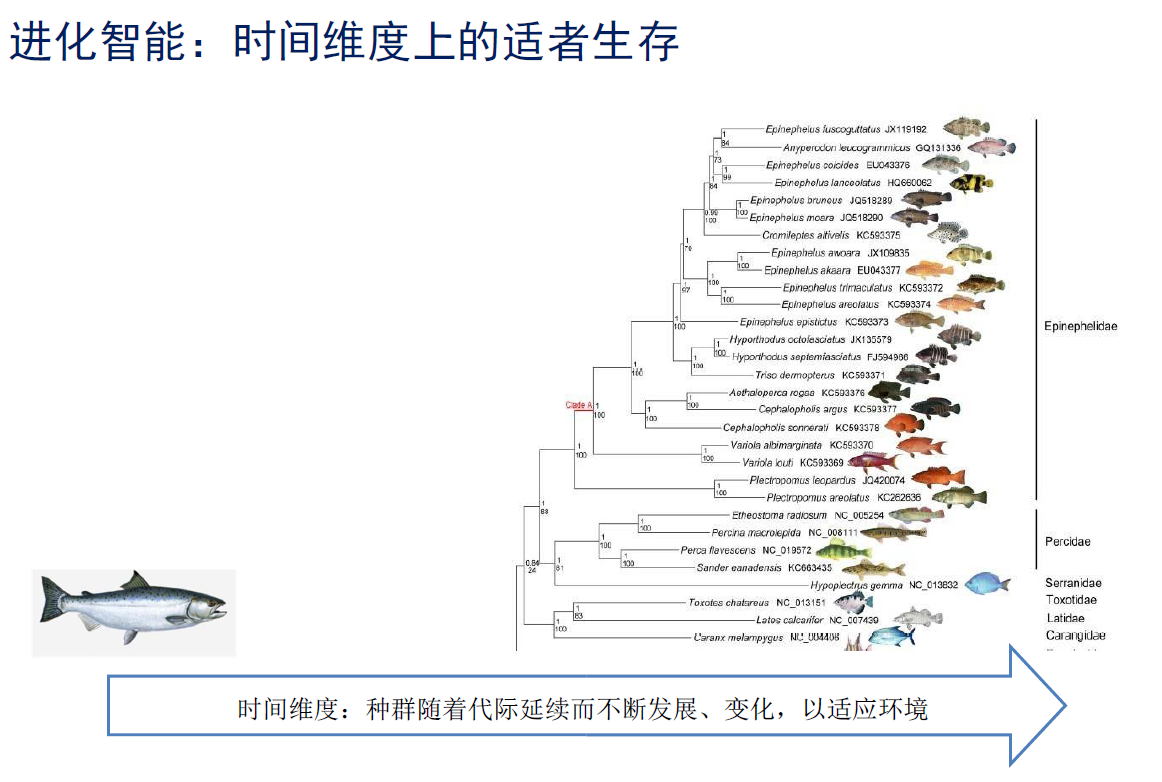
进化智能:时间维度上的适者生存
• 第一个维度是时间维度:种群通过代际繁衍,经历千万年的发展,不断进化以适应环境。借鉴物种随时间进化的过程来求解问题,就是进化智能。
进化智能
• 进化智能的思想来源于新达尔文主义。
• 新达尔文主义认为,生物进化包括4个过程:
繁殖、突变、竞争、选择
– 繁殖是生物 基本特征;
– 突变保证了生物体在不断变化的环境中具有适应能力;
– 竞争和选择则是物种在有限资源、有限空间情况下的优化过程。
进化智能
• 进化智能用计算机模拟生物进化的过程。
– 将要求解的问题抽象为“物种”
– 将限制条件抽象为“环境”
– 使用选择、突变和繁殖来模拟物种在环境中的进化,
– 通过不断进化,寻找到 理想的解决方案。
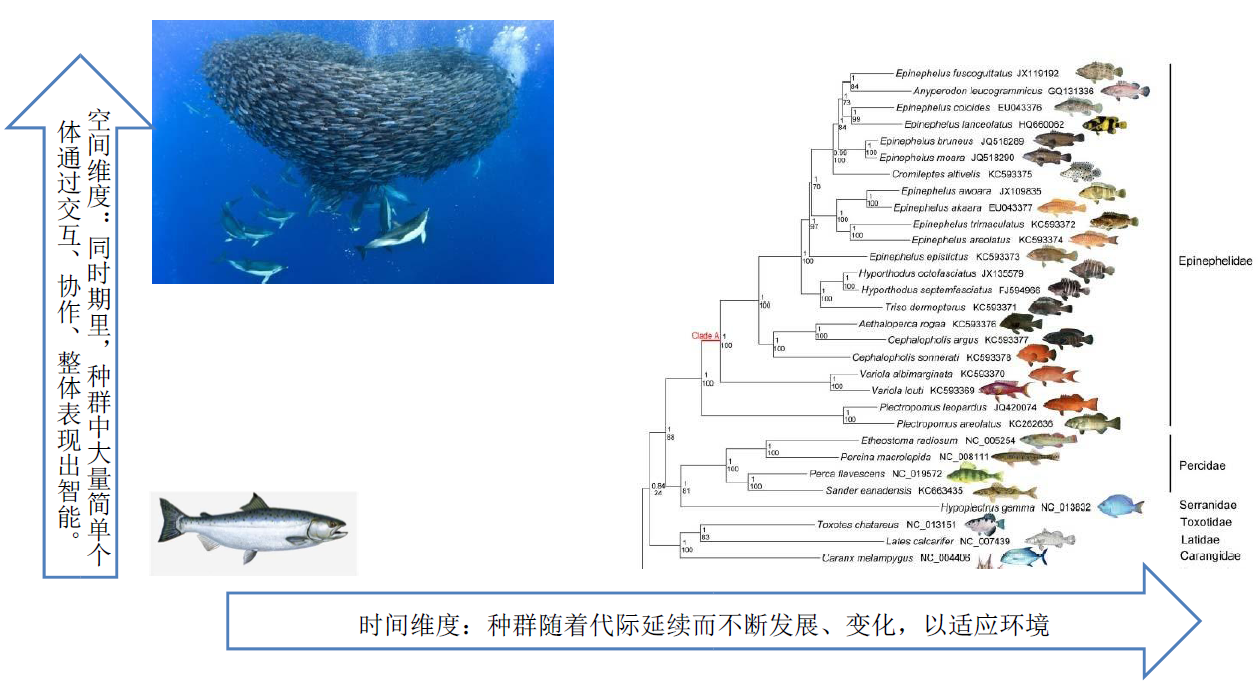
群体智能:空间维度上的适者生存
• 第二个维度是空间维度:在同一时间,种群内的大量简单个体在限定条件下通过交互协作,使整体种群具有某种适应环境的能力。模拟这种群体行为产生的智能,称为群体智能。
群体智能
• 在现实生活中有很多群体生物,如蚂蚁、蜜蜂、候鸟、鱼群、微生物等。它们的特点是:“个体行为简单,不具备独立的复杂的智能能力;群体行为复杂,具有智能特征,可以解决许多复杂问题。”
• 以群体为研究对象,研究群体产生智能的原理,并抽象建立计算模型,就是群体智能。
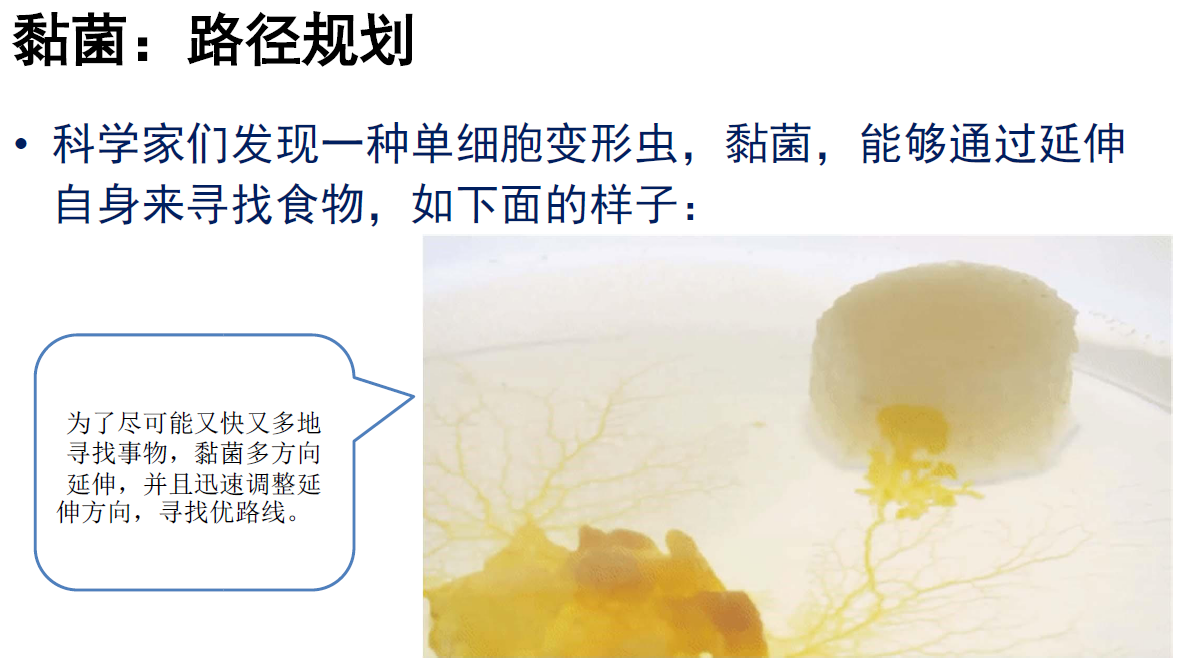
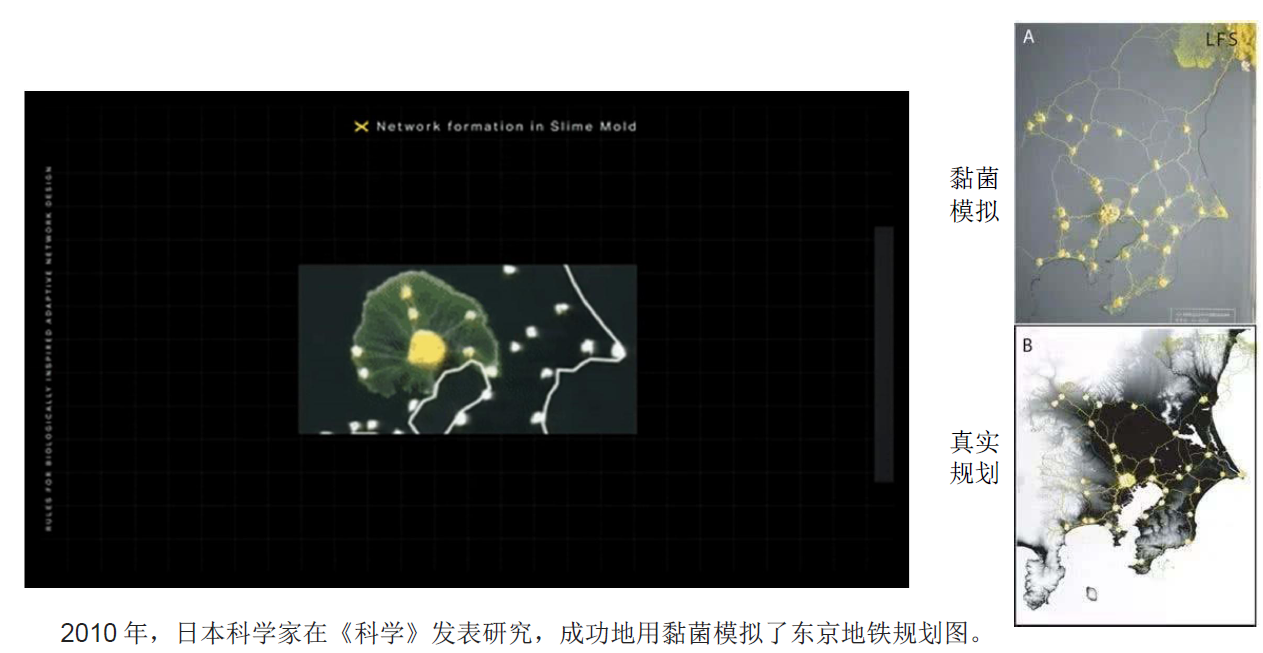
黏菌:路径规划
• 科学家们利用黏菌的特点,设计类似于地图的环境,让黏菌规划路线:
– 在地图的大城市位置放置食物
– 在不宜铺设铁路的位置放置“盐”——黏菌讨厌的东西
– 让黏菌从一点出发,寻找食物
• 结果非常令人惊奇