-
1 章节内容
-
2 PPT
-
3 视频
主要内容:
正反转控制线路的构成;自锁和互锁的概念;顺序控制线路的构成。
重点难点:
正反转线路中互锁的概念和作用;会设计顺序控制电路。
内容精要:
一、电动机的正反转控制线路
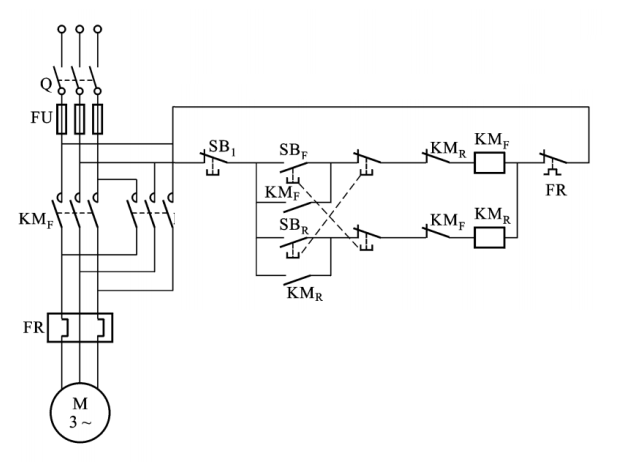
有些生产机械的运动部件需要作相反两个方向的运动,需要改变电动机的旋转方向。要改变三相异步电动机的转向,只须将电动机联接到电源的三根电源相线中的任意两相对调,改变接入电动机的三相电流相序即可。为此要用两个交流接触器来实现这一目的,如下图 所示。
工作原理
当正转接触器 KMF工作时,电动机正转;当反转接触器KMR工作时,由于调换了两根电源相线,所以电动机反转。
如果两个交流接触器同时工作,它们的主触点都闭合,必将造成电源短路。因此,为了保证两个接触器不同时工作,在控制电路中,串接了对方的动断辅助触点KMR和 KMF,即把正转接触器KMF的一个动断辅助触点串接在反转接触器KMR的线圈电路中,而把反转接触器的一个动断辅助触点串接在正转接触器的线圈电路中。这两个动断触点称为电气互锁(联锁)触点。这样一来,当按下正转起动按钮SBF时,正转接触器线圈通电,主触点 KMF闭合,电动机正转。与此同时,联锁触点断开了反转接触器KMR的线圈电路。因此,即使误按了反转起动按钮SBR,反转接触器也不能动作。在同一时间里两个接触器只允许有一个在工作的控制作用称为互锁作用或联锁作用。
但是在正转过程中要求反转,必须先按停止按钮 SB1,让联锁触点 KMF闭合后,才能按反转起动按钮使电动机反转,这样一来,带来操作上的不方便。为了解决这个问题,除了利用接触器的动断触点进行电气互锁外,还可以利用复合按钮触点动作的先后顺序不同进行机械互锁。每一个复合按钮都有一副动合触点和一副动断触点,两个起动按钮的动断触点分别与对方的接触器线圈串联。当按下正转起动按钮 SBF时,它的动断触点先断开反转接触器的线圈电路;当按下反转起动按钮SBR时,它的动断触点先断开正转接触器的线圈电路。因此,采用这种复合按钮,在改变电动机转向时可以不必先按停止按钮,只要按下相应的另一起动按钮即可。如果两种互锁方式同时采用,构成双重互锁,相互制约工作更为可靠。
在正反转控制电路中,短路保护、过载保护、失压和欠压保护所用的电器和保护原理都和直接起动控制电路相同。
二、电动机的顺序控制线路
电动机的控制中,有时需要控制两台以上的电动机。以两台电动机为例:
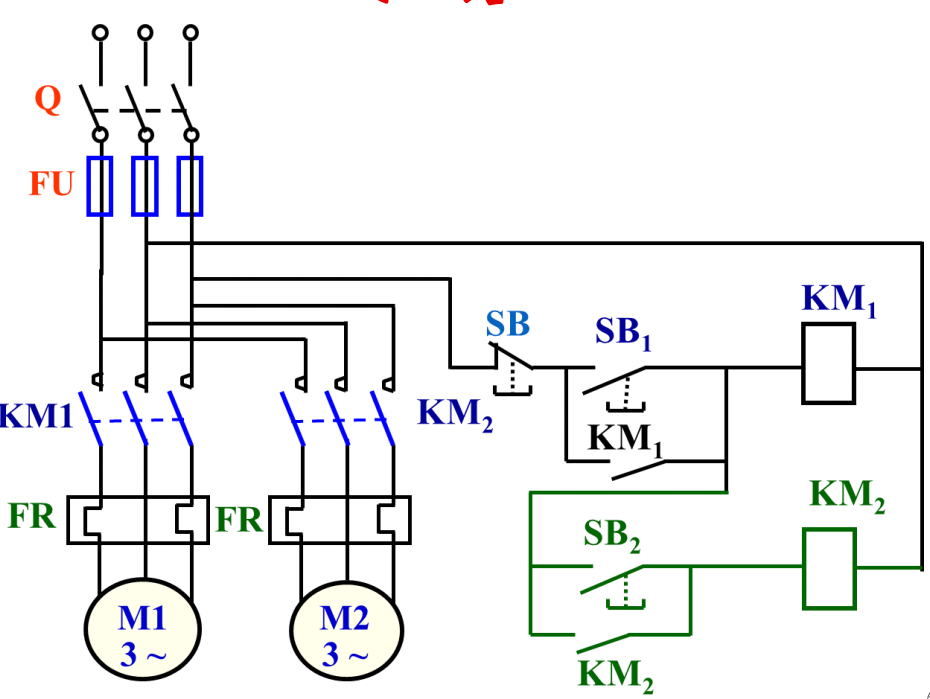
(1)起动时:要求M1先起动,M2才能起动(M2后起动);M2既不能单独起动,也不能单独停车。控制线路如下图:
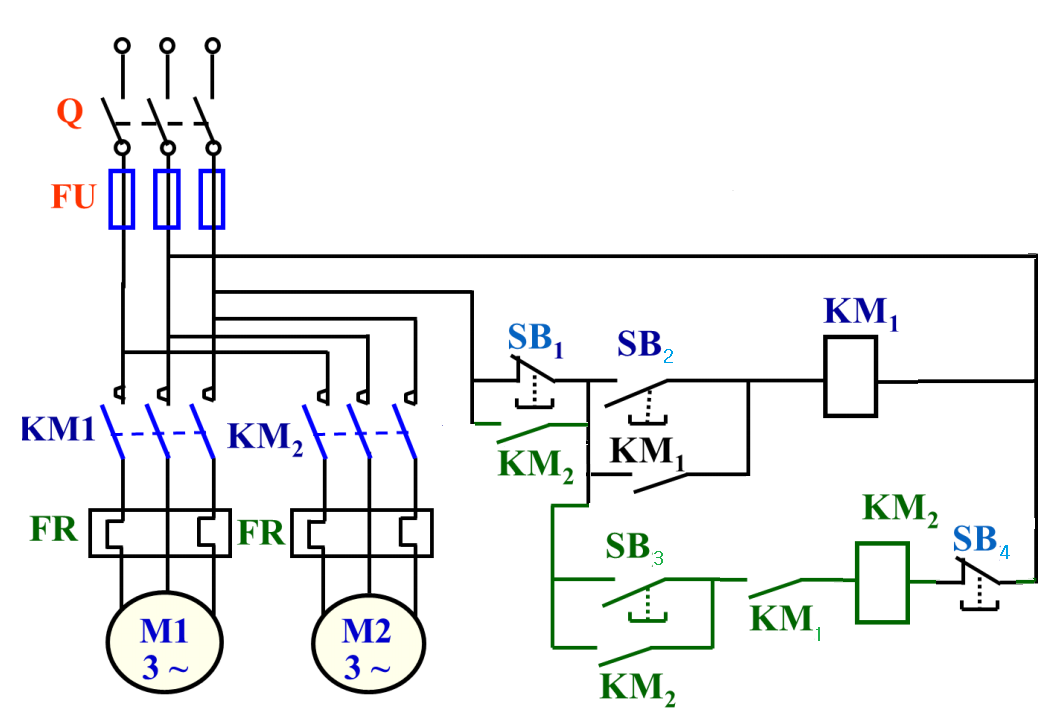
(2)起动时:要求M1先起动,M2才能起动(M2后起动);
停车时:M2先停车M1才能停车。控制线路如下图: