5.5 元胞自动机及其应用
元胞自动机(CellularAutomata,CA)是一种时间、空间、状态都为离散,空间相互作用和时间因果关系都为局部的网格动力学模型。它广泛地应用于地理建模研究中,如城市扩展、土地利用变化、疾病扩散、火灾蔓延、沙漠化、洪水淹没、人口迁移、交通控制、紧急事件的地理疏散、环境资源管理、生态安全、公共设施动态选址、城市规划及可持续发展等众多领域。
5.5.1 元胞自动机
5.5.1.1 元胞自动机的概念
元胞自动机是在一个具有离散、有限状态的元胞组成的元胞空间上,按照一定的局部规则在离散的时间维上演化的动力学系统。具体来讲,构成元胞自动机的部件称为“元胞”,每个元胞具有一个状态,这个状态只能取某个有限状态集中的一个,例如“生”或“死”,或者是256种颜色中的一种等。这些元胞规则地排列在被称为“元胞空间”的空间格网上,它们各自的状态随着时间变化,并且根据一个局部规则来进行更新,即一个元胞在某时刻的状态仅仅取决于上一时刻该元胞的状态以及该元胞的所有邻居元胞的状态;元胞空间内的元胞依照这样的局部规则进行同步的状态更新,整个元胞空间则表现为在离散的时间维上的演化。
5.5.1.2 元胞自动机的构成
元胞自动机包括四个基本要素:元胞(Cell)及元胞状态(States of cell)、元胞空间(Lattice)、邻域(Neighbor)、转换规则(Rules)。
1.元胞及元胞状态
2.元胞空间
3.元胞邻域
4.规则
5.5.1.3 元胞自动机的一般特征
1.同质性与齐性。
2.空间离散性和时间离散性。
3.同步计算(并行性)。
4.时空局部性。
5.开放性与灵活性。
6.高维性。
5.5.2 地理元胞自动机
5.5.2.1 地理元胞自动机的概念
地理元胞自动机(Geo Cellular Automata,Geo CA)是将复杂的地理现象和 CA 进行结合研究的专题应用模型,是针对复杂地理系统而对元胞自动机模型的扩展和“地理化”,是复杂地理系统研究的有效手段。
在地理元胞自动机中,元胞空间的概念可以很自然地转变为笛卡尔坐标系下的地理空间。在数据模型层次上,常用的二维元胞空间可用栅格(Grid)数据模型来表示。因此,在地理元胞自动机模型中,元胞空间被赋予了空间尺度的概念,元胞的大小对应于空间分辨率。不同的元胞空间尺度会影响地理元胞自动机模型的其他方面,如转换规则等。
5.5.2.2 地理元胞自动机的转换规则
1.全局转换概率
全局转换概率是在整个元胞空间起作用的元胞转换概率。在空间上,它对整个元胞空间内的每一个元胞都是相同的;在时间上,它在整个模拟过程中都不会发生变化。
2.邻域影响概率
邻域影响概率是指邻域元胞对中心元胞转换概率的影响,通常用邻域函数来表示。在元胞自动机模型的运行过程中,元胞空间内所有元胞的状态都有可能发生改变,因而,对某一个元胞而言,其邻域元胞的状态在整个模拟过程中有可能会不断变化,所以该元胞的邻域影响概率也是不断变化的。此外,元胞空间内的每一个元胞的邻域影响概率仅受到其邻域元胞的影响,因而影响范围比较小。
3.单元约束条件
单元约束条件是针对某一个具体的元胞而言的。它是指元胞本身在转换过程中,由元胞自身的属性决定而受到的限制性条件,通常可以理解为元胞对某一种状态的适宜性程度,在地理元胞自动机模型中可以用适宜性评价结果来表示。此外,为了在地理元胞自动机模型中引入政策等不确定性因素对地理现象演变的影响,往往在地理元胞自动机模型的转换规则中引入随机因子。
5.5.3 城市动态演化模拟的Geo CA模型
城市扩展空间格局演变研究一直是城市化研究的重点。在城市化高速发展的背景下,研究城市扩展空间格局演化情况,进而预测城市空间发展方向具有重要的理论和现实意义。
城市的发展受到各方面的综合影响,大致可以分为以下三个层次:一是宏观因素,包括城市整体可持续发展、地势以及城市的规划等,这些因素能直接决定某元胞点是否能发展为城市;二是中观因素,如交通环境以及离城中心的距离等,这些因素作为城市发展的驱动力影响城市的发展方向以及速度;三是微观因素,则是考虑某中心元胞本身的状态以及周边邻域的城市密度以及遗传效应等,这种因素往往能对短期城市扩张起到很大的作用。
5.5.3.1城市元胞状态及邻域的定义
为研究城市向外扩张的模型,将研究区域分为城市用地和非城市用地两类,分别用1、0表示,即元胞状态为S={0,1}。为使模型能正常运行,将数据用栅格图显示,栅格图中的每个像元代表一个元胞,元胞的状态即为城市化的状态。
5.5.3.2约束性条件及转换规则
地理系统具有的非线性和开放性等特征决定了其复杂的本质属性,其作用方式包括生物及非生物等多种因素影响以及各地理要素与周围环境不断的物质、能量、信息交换。城市系统亦是如此,它由社会、经济、环境等因素共同作用,且由于因素本身的开放性,决定了对城市的发展扩张预测具有相当的复杂性。
在不考虑城市衰退的情况下,若一个元胞已经发展为城市,则下一时刻继续保持;而若一个元胞为非城市状态,下一时刻的状态受到很多条件的约束,包括所属位置是否为水域、坡度大小、地质稳定程度等等,将此类条件统称为约束性条件。为了量化不同约束条件对城市发展不同的作用方式,以下分5种进行说明:
1.绝对约束。直接决定元胞是否能转换为城市用地的条件,如元胞本身状态以及是否为水域,其作用方式可简单描述1和0。
2.相对约束。指能对城市发展起到约束但不能直接决定的条件,如坡度、与交通网的距离等,可以用特定函数将其范围控制在0和1之间。
3.邻域影响。元胞邻域作用,通过密度来表示。
4.政府规划。
5.随机因素。
最后通过耦合所有因素计算下一时刻元胞发展为城市的概率 。
。
5.5.3.3案例分析——武汉市城市扩张模拟
通过Landsat TM影像提取武汉市2000年和2009年城镇建设用地和非城镇用地。收集整理武汉市城市规划图、道路交通网、水域图以及DEM数据,在ArcGIS平台上统一集成为CA待用的空间约束及驱动数据,并以栅格图的形式输出。
以2000年作为基期年,结合空间约束数据,按照上述模型进行建模。对于模型中涉及的参数,以2009年城市用地图作为参照来校准。实验表明以0.5年为时间间隔单位模拟效果最佳,通过不断实验调整得到最优模型参数,模拟2009年的武汉市城市用地,与解译的2009城市用地数据对比分析,Kappa系数达到0.59,说明CA模型能很好地模拟城市扩张趋势。另外,若不考虑城镇规划约束,模拟得到的城市用地Kappa系数0.55,可见政策因子在城市扩张中起到不可忽视的作用。最后以调整好的参数作为参考,再以2009年为基期年,按CA扩展邻域模型预测2018年武汉市城市用地情况。
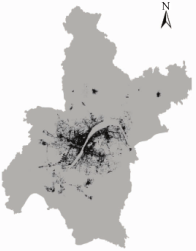



a2000年城市用地 b 2009年城市用地 c 2009年模拟城市用地 d 2018年模拟城市用地
图5.18 武汉市城市扩张的元胞自动机模拟


