-
1 四杆机构设计
-
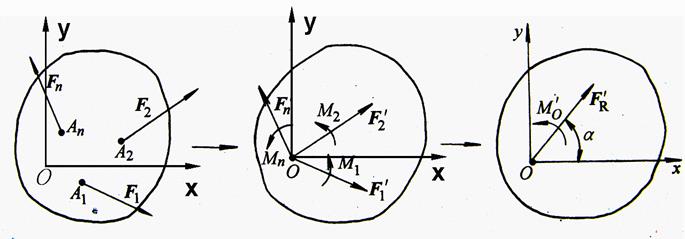
2 平面力系的简化
-
3 平面力系的平衡问题
-
4 拓展训练
四杆机构的设计

四杆机构的设计
四杆机构设计的任务,主要是根据给定条件选择四杆机构的形式,并确定机构的尺寸参数。
四杆机构的设计方法有解析法、图解法和实验法三种。解析法精确度较高,虽计算繁复,但随着计算机的普及和应用,计算机辅助设计四杆机构已成为必然趋势。实验法烦琐、费时且不精确。本节只要介绍比较直观、简明,易于操作的图解法。在计算机辅助设计中,由各参数的函数式,用Matlab软件计算出机构的轨迹点的坐标,拟合出机构的轨迹,从而画出相应的四杆机构.

1. 按给定的行程速比系数设计四杆机构
给定的行程速比系数K,就是给定了四杆机构急回运动的条件,从而确定了极位夹角;根据其它一些限制条件及极位夹角,可用作图法方便地作出该四杆机构。
设已知摇杆长度LCD、摆角Ψ和行程速比系数K。试设计该曲柄摇杆机构。
设计分析:如图2-65a所示,显然在已知摇杆长度LCD、摆角Ψ的情况下,只要能确定A铰链的位置,则在量得LAC1和LAC2后,可求得曲柄长度LAB和连杆长度LBC
![]()

LAD可直接量得。如图2-65b所示由于A点是极位夹角的顶点,即∠C1AC2=θ,如过AC1C2三点作辅助圆,由几何知识可知,在该圆上任取一点A为顶点,其圆周角也是θ,且过辅助圆心O的圆心角∠C1OC2= 2θ。显然,当求得极位夹角θ后,用作图法容易作出辅助圆并得到圆心O,则问题迎刃而解。
图2-65 按行程速比系数K设计
a)设计分析图 b)作图法
设计步骤:
1)计算:按式(2-2)求得θ
2)作摇杆的两极限位置:任选摇杆回转中心D的位置,按一定的比例尺μl,根据已知的LCD及摆角Ψ作出摇杆的两个极限位置C1D和C2D(图2-65b)。
3)作辅助圆:联接C1、C2,并作与C1C2成90°-θ的两直线,设交于O点,则∠C1OC2 = 2θ。以O点为圆心,以OC1(或OC2)为半径作辅助圆。
4)在上任取一点A为铰链中心,并连接AC1和AC2,量得LAC1和LAC2的长度,据此可求出曲柄和连杆的长度
![]()

5)求其它杆的长度:机架LAD可直接量得,乘比例尺μl既为实际尺寸。
注意,由于A点是在辅助圆上任选的一点,所以实际可有无穷解。若能给定其它条件,如曲柄长度LAB、机架长LAD或最小传动角γmin等,则可有唯一的解。实际设计时,多数均有相应的辅助条件。
与上述方法相似,可在已知滑块行程s、偏距e和行程速比系数K的情况下,设计偏置曲柄滑块机构,或在已知机架长度和行程速比系数K的情况下,设计摆动导杆机构,具体设计步骤读者可自行导出。
2. 按给定的连杆位置设计四杆机构
设已知:连杆BC的长度lBC及其两个位置B1C1、B2C2。
设计分析:图2-66可知,如能确定固定铰链A、D的中心位置,便可确定各构件的长度。由于连杆上B、C两点的轨迹分别在以A、D为圆心的圆周上,所以A、D两点必然分别位于B1B2、C1C2和中垂线b12和c12上。据此,可得设计方法和步骤如下:
设计步骤:
1)选比例尺μl,根据已知条件画出连杆的两个位置B1C1、B2C2。
2)分别连接B1、B2和C1、C2点,并作它们的中垂线b12和c12。
3)在b12上任取一点A,在c12上任取一点D,连接AB1C1D,则AB1C1D即为所求的四杆机构。各杆长度分别为:LAB =μlLAB1,LCD=μl LCD1,LAD=μl LAD。
注意,在已知构件两个位置的情况下,由于A、D两点在是任取的,故有无数解。若给出其它辅助条件,如机架长度及其位置等,就可得出唯一解。此外,如给定连杆长度及其三个位置,则答案就是唯一的,读者可自行推出。