
第七节 无人机发射回收方式
一、发射方式
无人机的发射方式可归纳为手抛发射、零长发射、弹射发射、起落架滑跑起飞、母机携带空中发射、容器式发射装置发射和垂直起飞等类型。在地面发射时,无人机使用较为广泛的发射方式是零长发射与弹射式发射方式。大展弦比机翼的无人机,特别是长航时无人机,通常用起落架滑跑起飞方式。空中发射方式的主要优点是机动性高,发射点活动范围大,可降低无人机燃油载量和航程要求。小、轻型无人机多采用这种发射方式,尤其是在美国。容量式发射装置常用于发射轻型无人机,或用于军舰和潜艇上发射无人机。垂直起飞方式是旋翼无人机广为采用的起飞方式。
(1)手抛发射
这种发射方式最简单,由 1 人或 2 人操作,靠无人机自身动力起飞。手抛发射的无人机通常最大尺寸小于 3m,发射质量多数小于7kg。例如FQM-151A「指针」,该机是单人携带/发射式无人机,翼展 2.74m,机长1.83m,最大发射质量3.6kg。英国的BIT-1lmp 是单人发射无人机,其翼展1.83m,机长 1.09m,最大发射质量 5.9kg。

(2)零长发射
无人机安装在零长发射装置上,在 1 台或多台助飞火箭发动机推力作用下飞离发射装置,无人机起飞后,抛掉助飞火箭,由机上主发动机完成飞行任务。例如加拿大的 CL-289,该机机身尾部装 1台涡喷发动机,在其后通过推力杆接 1 台助飞火箭发动机。在助飞火箭作用下,无人机从车载零长发射装置上发射。助飞火箭工作几秒后自动分离无人机,由涡喷发动机完成飞行任务。英国的ASAT/「小鹰」,机身下部两侧各装 1台可弃式助飞火箭,在 2 台助飞火箭作用下,无人机由零长发射架上起飞。助飞火箭工作 1.3s 后被扔掉,无人机由机上涡喷发动机完成飞行任务。

(3)弹射式发射
无人机安装在轨道式发射装置上,在压缩空气、橡皮筋或液压等弹射装置作用下起飞,无人机飞离发射装置后,在主发动机作用下完成飞行任务。例如,英国的「不死鸟」在液压弹射器作用下从车载斜轨上发射;法国的「玛尔特」MKII 在弹簧索弹射装置作用下从斜轨上发射;比利时的「食雀鹰」在自带的M3 型火箭助推器作用下由 2.5m 短轨上发射。

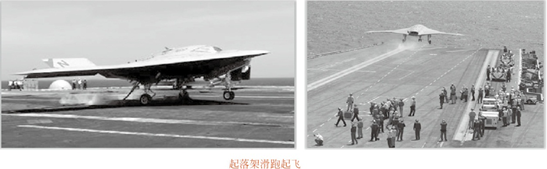
(4)起落架滑跑起飞
这种起飞方式与有人机相似,所不同的是:① 有些无人机采用可弃式起落架,在无人机滑跑起飞后,起落架便被扔下,回收无人机时,采用其他方式;②大多数无人机,尤其是轻、微型无人机,采用非收缩型起落架,航程较远和飞行时间较长的大、小型无人机采用可收放起落架;③ 起飞滑跑跑道短,对跑道的要求也不如有人机那样严苛。例如美国的「秃鹰」、巴西的 BQM-1BR 采用可弃式起落架。
(5)母机携带、空中发射
无人机由有人机(固定翼飞机或旋翼式直升机)携带到空中,当飞行到某飞行高度和速度时,空中发射无人机。固定翼母机携带无人机,一般采用翼下悬挂或机腹半隐蔽式携带方式,直升机一般由机身两侧携带无人机。例如意大利的「米拉奇」100 由 Agusta A109 直升机空中发射,美国的 154 型由 DC-130「大力神」母机携带,进行空中发射。目前正在研究由无人机作母机,空中发射无人机的方式。
(6)容器式发射装置发射
容器式发射装置是一种封闭式发射装置,兼备发射与储存无人机的功能。它有单室式和多室式两种类型。德国 KDAR 无人机用单室式发射装置发射。多室式发射装置含有多个发射室,每室内有一架无人机,安置在室内发射轨道上,室内还配有动力设备和电子设备。发射时,靠室内动力设备开启室门,推出轨道,调整发射角度,可按先后次序发射每个室内的无人机或成组发射无人机,也可同时齐发无人机。例如,美国的「勇士」200 采用一种国际标准尺寸2.44 m×2.44m×6.1m 的容器式发射装置,此装置可装15 架无人机;德国的DAR 采用车载多室式发射装置,该装置可装20 架 DAR 无人机。

(7)垂直起飞
垂直起飞有两种类型。
① 旋翼垂直起飞。这种起飞方式的特点是以旋翼作无人机的升力工具,旋转旋翼使无人机垂直起飞。旋翼垂直起飞分为单旋翼尾旋翼式(如美国的ARC003)、共轴反旋双旋翼式(如加拿大的CL-227「哨兵」、美国的QH-50)。由于这种起飞方式不受场地面积与地理条件的限制,因此适用范围广。
② 固定翼垂直起飞。固定翼无人机垂直起飞有两种情况。一种是飞机在起飞时,以垂直姿态安置在发射场上,由飞机尾支座支撑飞机,在机上发动机作用下起飞。例如美国的XBQM-108A 无人机,它保留普通起落架装置,机尾有尾支座,可采用起落架滑跑方式起飞,也可以垂直姿态起飞。另一种是在机上配备垂直起飞发动机,在该发动机推力作用下,飞机垂直起飞。例如,美国格鲁门公司设计的754 型无人机,机上装有两种发动机:一种是巡航用涡轮风扇发动机,它沿无人机纵轴方向安装于机下发动机短舱内;另一种是起飞(着陆)用涡轮喷气发动机,装于机身内重心处,发动机轴线相对于飞机垂直线前倾20°,涡轮喷气发动机只在无人机起飞(着陆)阶段工作 30s 左右,由它提供85% 垂直起飞升力,由涡轮风扇发动机提供15% 垂直起飞升力,在这两种发动机的作用下,飞机垂直起飞(着陆)。

二、回收方式
无人机的回收方式可归纳为伞降回收、空中回收、起落架滑跑着陆、拦阻网或「天钩」回收、气垫着陆和垂直着陆回收等类型。有些无人机采用非整机回收,这种情况通常是回收任务设备舱,飞机其他部分不回收。例如美国的D-21/GTD-21B,在完成飞行任务后,其任务设备舱被弹射出机体,由 C-130 飞机空中回收。有些小型无人机在回收时不用回收工具而是靠机体某部分直接接触地面来回收。采用这种简单回收方式的通常是机体质量小于 10kg,最大特征尺寸在 3.5m 以下的无人机。例如英国的 UMACII 飞翼式无人机,完成任务后靠机腹着陆回收。
(1)伞降回收
这是一种普通的回收方式。降落伞由主伞和减速伞(也称阻力伞)二级伞组成。当无人机完成任务后,地面站发出遥控指令给无人机,使发动机慢车,无人机减速、降高。无人机到达合适飞行高度和速度时,开减速伞,使无人机急剧减速、降高,此时发动机已停车。当无人机降到某飞行高度和速度时,回收控制系统发出信号,使主伞开伞,先呈收紧充气状态,过了一定时间,主伞完全充气。无人机悬挂在主伞下慢慢着陆,机下触地开关接通,使主伞与无人机脱离。这是对降落伞回收过程最简单的描述,省略了中间环节和过程。为尽量减少无人机回收后的损伤,特别是为保护机载任务设备,有些无人机还在机体触地部位安装减震装置,如充气袋就是一种常用的减震装置;同时还考虑机体着地部位尽可能远离任务设备舱。例如加拿大的CL-89,回收时,无人机上下翻转180°,使机腹在上、机背在下,机背前后的着陆气包着地,吸收撞击能量,保护机腹内的任务设备。有些无人机机体着地部分被设计成较脆弱的部件,当作飞机着地的减震装置。例如英国的「不死鸟」在回收开伞后翻转180°,机腹朝上,机背向下,机背整流罩较脆弱,允许着地时被压扁,吸收着地撞击力,保护机腹的任务设备短舱。
(2)空中回收
用有人机在空中回收无人机的方式目前只在美国使用。采用这种回收方式,在有人机上必须有空中回收系统,在无人机上除了有阻力伞和主伞之外,还需有钩挂伞、吊索和可旋转的脱落机构。其简单回收过程如下:地面站发出遥控指令,阻力伞开伞,同时使发动机停车,当无人机在阻力伞作用下降到一定高度和一定速度时,回收系统发出开主伞控制信号,打开钩挂伞和主伞,主伞先呈收紧充气状态,不久,就完全充气。此时钩挂伞高于主伞,钩挂伞下面的吊索保证指向主伞前进的方向,在吊索上安装指示方向的风向旗,使有人机便于辨认和勾住钩挂伞。这时,有人机逆风进入,勾住无人机钩挂伞与吊索,当无人机被勾住时,主伞自动脱离无人机,有人机用绞盘绞起无人机,空中悬挂运走。这种回收方式不会损伤无人机。但是为回收无人机要出动有人机,费用高;在回收时要求有人机驾驶员有较高的驾驶技术,受天气与风情影响大,加上伞的性能无法事先估计,其回收的可靠性低。随着回收技术的提高,回收的可靠性将会提高。例如美国的「火蜂」Ⅱ 用中空回收方式,在回收时,直升机钩挂高于主伞24.08m 的钩挂伞。
(3)起落架滑跑着陆
这种回收方式与有人机相似,不同之处是:① 对跑道要求不如有人机苛刻;② 有些无人机的起落架局部被设计成较脆弱的结构,允许着陆时撞地损坏,吸收能量,例如英国的「大鸭」Ⅰ,这是一种机体质量 15kg、翼展 2.70m、机长 2.10m 的轻型无人机,机身下有着陆滑橇,机翼有翼尖滑橇,翼尖滑橇较脆弱,回收时允许折断,以吸收撞击力;③为缩短着陆滑跑距离,有些无人机,例如以色列的「先锋」「猛犬」「侦察兵」等,在机尾装尾钩,在着陆滑跑时,尾钩勾住地面拦截绳,大大缩短了着陆滑跑距离。
(4)拦截网或「天钩」回收
用拦截网(也称拦阻网)系统回收无人机是目前世界上无人机较普遍采用的回收方式之一。拦截网系统通常由拦截网、能量吸收装置和自动引导设备组成。能量吸收装置与拦截网相连,其作用是吸收无人机撞网的能量,免得无人机触网后在网上弹跳不停,以致损伤。自动引导设备一般是一部置于网后的电视摄像机,或装在拦截网架上的红外接收机,由它们及时向地面站报告无人机返航路线的偏差。
当无人机返航时,地面控制站要求无人机以小角度下滑,最大速度不得超过120km/h,操纵人员通过电视监视器监视无人机飞行,并根据地面电视摄像机拍摄的图像,或红外接收机接收到的无人机信号,确定返航路线的偏差,然后半自动地控制无人机,修正飞行线路,使之对准地面摄像机的瞄准线,飞向拦截网。无人机触网时的过载通常不能大于6g,以免拦截网遭到较大损坏。例如以色列的「侦察兵」、美国的「苍鹰」等都用拦截网回收。
「天钩」回收和拦截网回收功能相似,回收时控制无人机飞向绳索,利用无人机翼尖的挂钩勾住绳索回收。美国的「扫描鹰」无人机便采取此种回收方式回收。
(5)气垫着陆
20 世纪 70 年代出现了气垫车、气垫船,它们利用气垫效应离开地面或水面腾空行驶。无人机气垫着陆的工作原理是一样的。在无人机的机腹四周装上「橡胶裙边」,中间有一个带孔的气囊,发动机把空气压入气囊,压缩空气从囊孔喷出,在机腹下形成高压空气区——气垫,气垫能够支托无人机贴近地面,而不与地面发生猛烈撞击。20世纪70 年代中期,美国用澳大利亚的「金迪维克」无人机作气垫着陆的研究机,进行气垫着陆项目试验研究,取得了较大成功。气垫着陆的优点是,无人机能在不平整的地面、泥地、冰雪地或水上着陆,不受地形条件限制;也不受无人机大小、重量限制,且回收率高,据说可以达到 1 架次/min,而空中回收则是 1 架次/h。
(6)垂直着陆回收
垂直着陆回收方式只需小面积回收场地,因不受回收区地形条件的限制,特别受到军方青睐。
这种回收方式有两种类型。
① 旋翼航空器垂直着陆。这种着陆方式的特点是以旋翼旋转作为获取升力的来源,操纵旋翼的旋转速度,使无人机垂直着陆。
② 固定翼垂直着陆。此种垂直着陆方式的特点是以发动机推力直接抵消重力。这种着陆方式又可分成两类:一是在无人机上配备着陆时用的专用发动机,着陆时,控制机上的主发动机和专用发动机的油门,使其在主发动机推力的垂直分力和专用发动机推力的共同作用下减速,垂直着陆;二是在回收时呈垂直姿态,在发动机推力的垂直分力作用下减速,垂直

