
飞机的飞行性能
上一节
下一节
第四节 飞机的飞行性能
一、滑翔
滑翔状态时发动机处于小油门状态,或怠速甚至关机状态。重力垂直向下,但是可分解成一个沿着飞行方向的力和一个垂直飞行方向的力。滑翔机在重力分力的作用下沿着飞行方向运动。空气反作用力的合力可以近似地分解为垂直飞行方向的升力和与之垂直并与飞行方向相反的阻力。这个力分解图跟水平飞行的四力图非常相似,不过整个图被旋转了一个角度,这就是所谓的下滑角。一个较大的下滑角会导致一个很大的重力分量,这个分量会拉着飞行器沿着其飞行轨迹运动。它会一直加速,直到空气反作用力的阻力分量变得足够大时,它才会再次进入平衡状态。
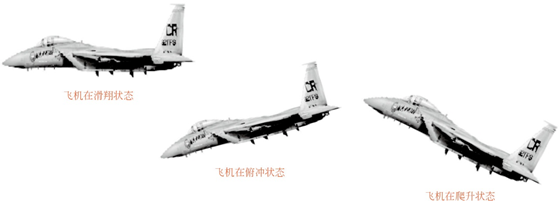
二、俯冲
在俯冲状态中,甚至在某些极限状态下,飞行轨迹完全垂直向下,重力和推力(如果还存在)同时拉着模型向下运动,这时唯一的反作用力就是阻力了。当阻力变得足够大以至于能够平衡重力和推力时,速度通常是极高的,但很可能在这个极限速度达到之前,飞机就已经坠毁了。
三、爬升
在爬升状态中,总的支持力是机翼的升力和发动机推力的合力。重力可以分解为两个分量:一个与升力反向;另一个与推力反向,也就是与阻力同向。结果就是四力的平衡状态下被旋转了一个爬升角。极限的情况就是垂直爬升,这时重力和阻力的方向与推力相反。这种飞行的例子常见于直升机,但是常规的固定翼飞行器,如果有足够的推力,它也是进行垂直爬升动作。在这种状态下,机翼的升力肯定为零,而且它的迎角也必须为零,这样才能不产生升力。因此,很明显的事实就是,想要爬升得更陡和更快就必须有强大的推力,机翼的作用是次要的,推力必须能够克服重力和阻力的合力。

