roboguide基本使用
上一节
下一节
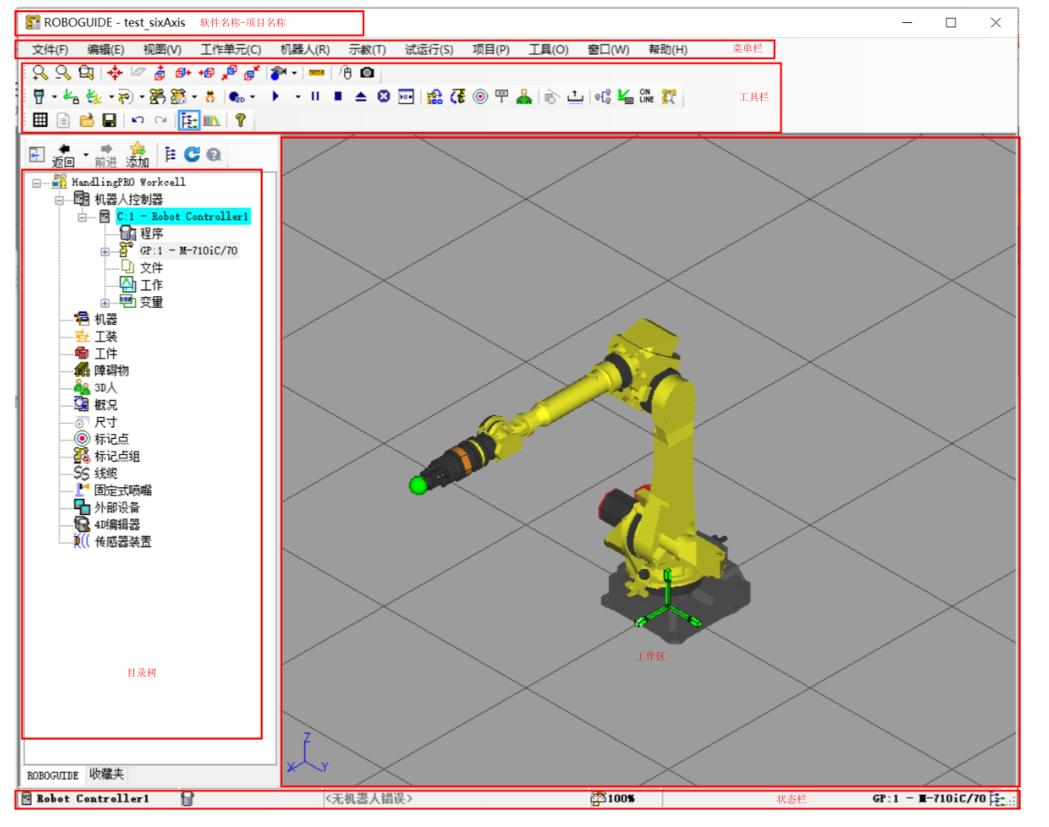
界面介绍
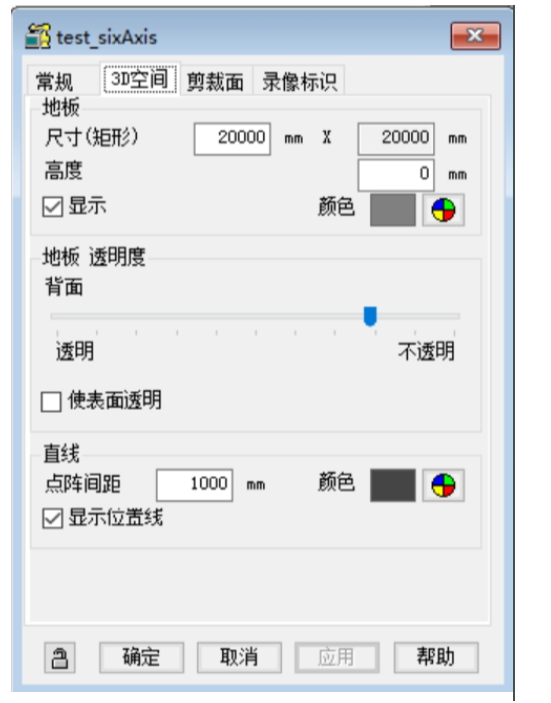
机器人下方底板的参数可以修改:点击工具栏工作单元–属性,出现对话框;
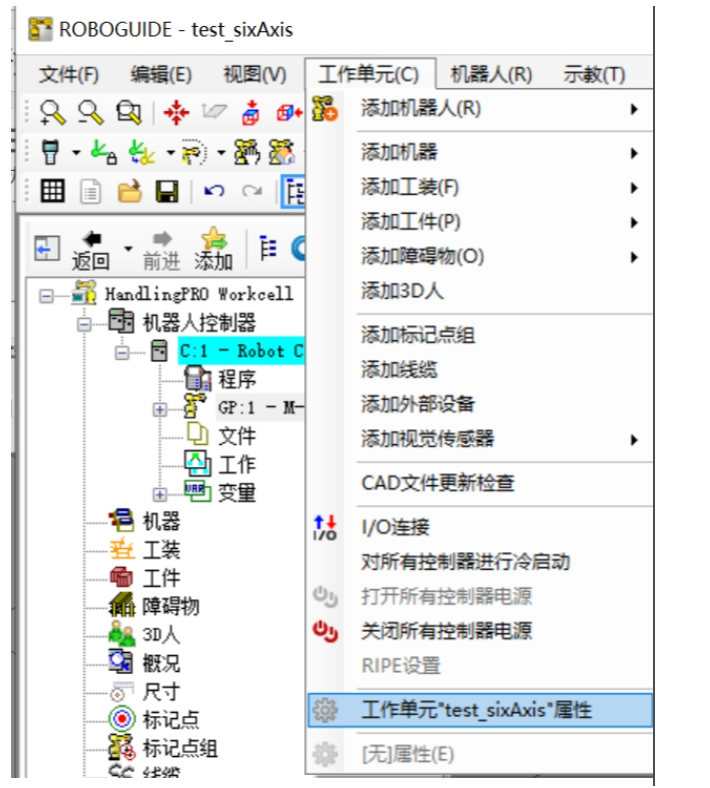
对话框中选择3D空间,可以设置底板参数。
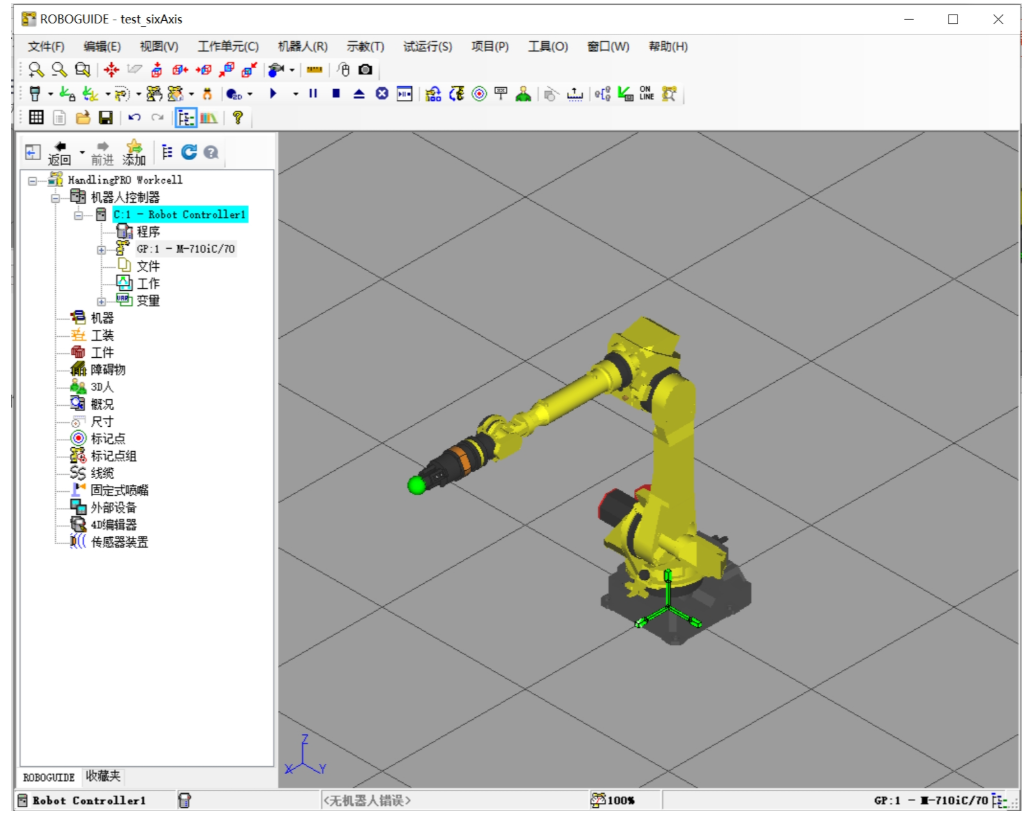
Cell Browser(单元浏览器) 树状结构界面介绍
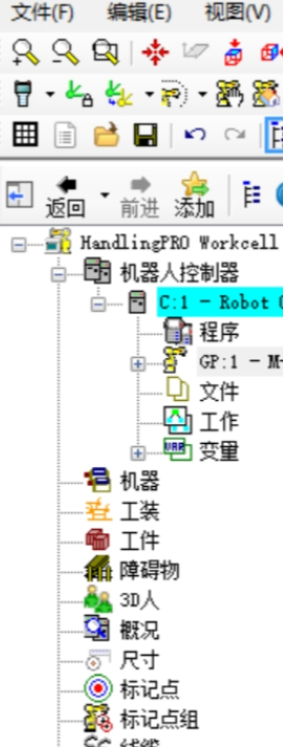
图中:
顶部根节点 HandlingPRO Workcell - 当前工作单元名称。HandlingPRO 是 ROBOGUIDE 专门用于搬运、码垛、上下料等应用场景的工程模板。
展开后显示C:1 - Robot Controller(1号控制器),这是仿真核心:
程序 (Programs)
存放所有 TP 程序(*.tp)。可以在这里编辑、复制、删除机器人运动程序,包含运动指令、逻辑指令、I/O 控制等。GP:1 - Master
代表第 1 组机器人(主机器人)。如果是多机协同,会有 GP:2、GP:3 等。包含机器人的运动组配置和轴参数。文件 (Files)
存放系统文件、宏指令(Macros)、Karel 程序、模型文件等。工作 (Jobs)
定义自动化任务流程,如与 PLC 的交互逻辑。变量 (Variables)
管理机器人寄存器(Registers)、位置寄存器(Position Registers)、字符串寄存器、I/O 状态监控等。
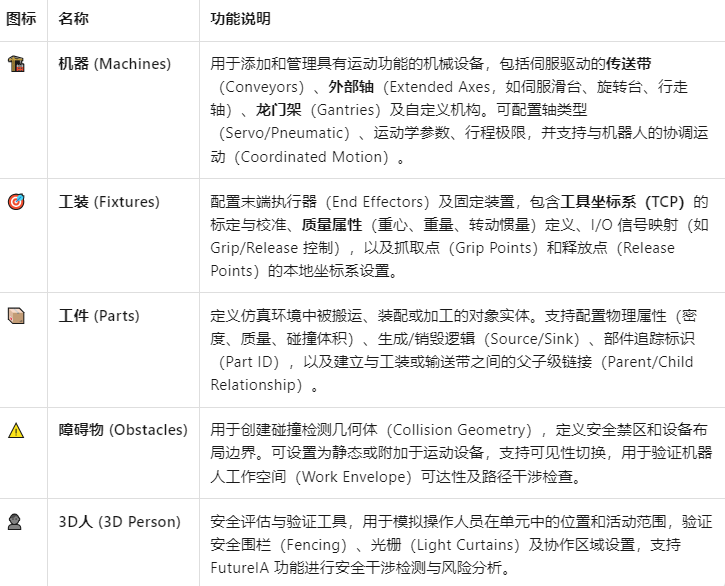
设备与对象层级