
1、软件总体介绍
ROBOGUIDE是一款FANUC机器人配套的软件,由日本发那科机器人公司提供。
该软件支持机器人系统布局设计和动作模拟仿真,可进行机器人干涉性、可达性的分析和系统的节拍估算,还能够自动生成机器人的离线程序,优化机器人的程序以及进行机器人故障的诊断等。
2、常用模块
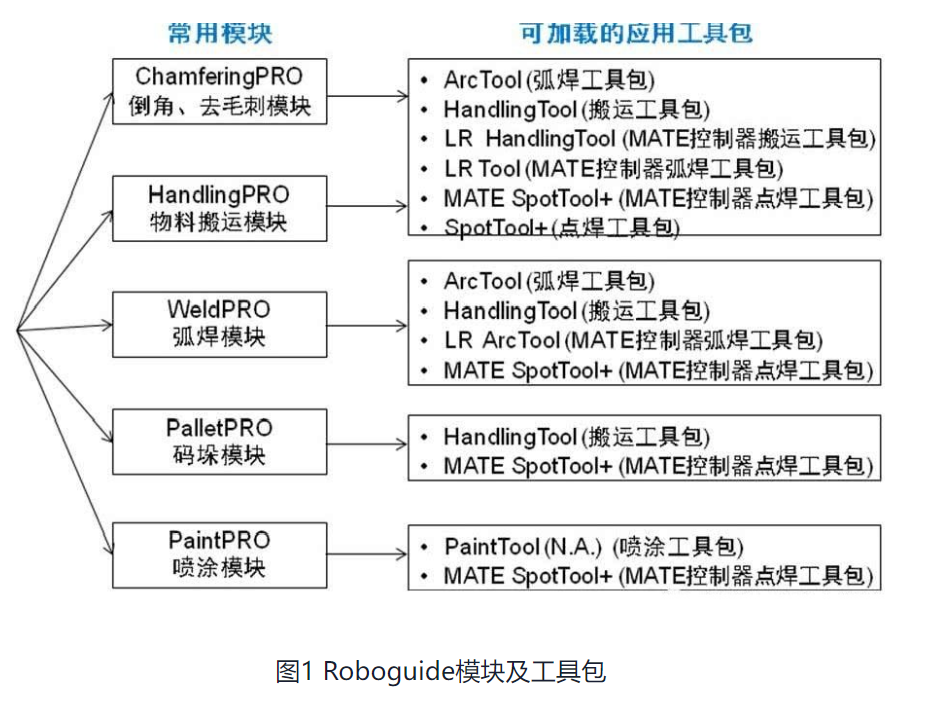
ROBOGUIDE是一款核心应用软件,常用的仿真模块有ChamferingPRO、HandlingPRO、WeldPRO、PalletPRO 和PaintPRO 等,各模块功能如下:
(1)ChamferingPRO用于去毛刺、倒角等工件加工的仿真应用;
(2)HandlingPRO用于机床上下料、冲压、装配、注塑机等物料的搬运仿真应用;
(3)WeldPRO用于焊接、激光切割等工艺的仿真应用;
(4)PalletPRO用于各种码垛的仿真应用;
(5)PaintPRO用于喷涂的仿真应用。
选择不同的模块决定着实现的功能不同,相应加载的应用工具包也会不同,如图1所示。
3.ROBOGUIDE中进行离线编程和仿真主要步骤
(1)创建工程文件
根据真实机器人创建对应的虚拟仿真机器人工程文件,创建过程中需要选择从事作业的仿真模块、控制柜及控制系统版本、软件工具包、机器人型号等。
工程文件会以三维模型的形式显示在软件的视图窗口中,在初始状态下只提供三维空间内的机器人模型和机器人的控制系统。
2)构建虚拟工作环境
根据现场设备的真实布局,在工程文件的三维世界中通过绘制或导入模型来搭建虚拟的工作场景,从而模拟真实的工作环境。譬如要模拟焊接的工作场景,就需要搭建焊接机器人、焊接设备及其他焊接辅助设备的三维模型,此时的工程文件亦可称之为机器人焊接仿真工作站。
(3)模型的设置
由三维制图软件绘制的模型除了在形状上有所不同外,并无本质上的差别。而ROBOGUIDE建立的工程文件,要求这些模型充当不同的角色,例如工件、机械设备等。编程人员要对相应的模型进行设置,赋予它们不同的属性以达到仿真的目的。
(4)控制系统设置
仿真工作站场景搭建完成以后,需要按照真实的机器人配置对虚拟机器人控制系统进行设置,包括工具坐标系的设置、用户坐标系的设置、系统变量的设置等。
(5)编写离线程序
在ROBOGUIDE的工程文件中利用虚拟示教器或者轨迹自动规划功能的方法创建并编写机器人程序,实现真实机器人所要求的功能,如焊接、搬运、码垛等。
(6)试运行程序
在软件中进行程序的仿真运行相对于真实机器人运行程序,实际上是让编程人员提前预知了运行结果,观察结果是否符合预期和检测程序的可行性,譬如是否造成机器人的限位、是否发生碰撞等,及时纠正程序错误并进一步优化程序。
(7)程序导出和下载
离线程序只需小范围修改甚至无需修改可直接导出到存储设备,并下载到真实的机器人中运行。

