
网络连接设备及工具的使用
实验目的:熟悉网络连接设备及工具的使用, 了解双绞线的特性与应用场合,掌握双绞线的制作方法。
实验要求:在实验课上,结合实验原理,通过使用压线钳等工具,制作直通线或者交叉双绞线,经过测试仪检测连接成功,完成实验。
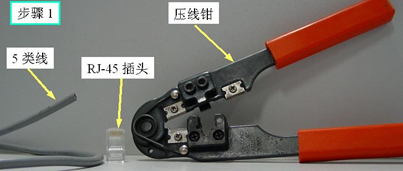
实验环境:RJ-45头若干、双绞线若干米、RJ-45压线钳一把、测试仪一套。
(1) 非屏蔽双绞线的六种类型
类别 应用
Cat 1 可转送语音,不用于传输数据,常见于早期电话线路 电信系统
Cat 2 可转输语音和数据,常见于ISDN和T1线路
Cat 3 带宽16MHz,用于10BASE-T,制作质量严格的3类线也可用于100BASE-T 计算机网络。
Cat 4 带宽20MHz,用于10BASE-T或100BASE-T。
Cat 5 带宽100MHz,用于10BASE-T或100BASE-T,制作质量严格的5类线也可用于1000BASE-T。
Cat 6 带宽高达200MHz,可稳定运行于1000BASE-T。
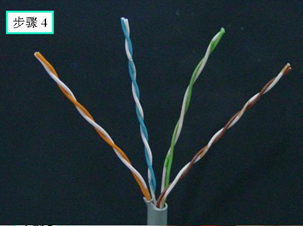
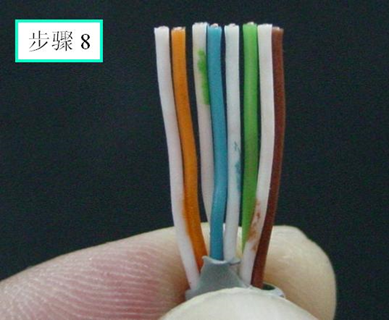
实验使用双绞线是5类线。由8根线组成,颜色分别为:
【橙白,橙】,【绿白,绿】,【蓝白,蓝】, 【棕白,棕】
(2)RJ-45连接器和双绞线线序
RJ45水晶头由金属片和塑料构成,特别需要注意的是引脚序号,当金属片面对我们的时候从左至右引脚序号是1-8, 这序号做网络联线时非常重要,不能搞错。
工程中使用比较多的是 T568B 打线方法,线序如下:
直通线:(机器与集线器连)
1 2 3 4 5 6 7 8
A端:橙白,橙,绿白,蓝,蓝白,绿,棕白,棕;
B端:橙白,橙,绿白,蓝,蓝白,绿,棕白,棕。
交叉线:(机器直连、集线器普通端口级联)
1 2 3 4 5 6 7 8
A端:橙白,橙,绿白,蓝,蓝白,绿,棕白,棕;
B端:绿白,绿,橙白,蓝,蓝白,橙,棕白,棕。
实验步骤(以机器与集线器连接之RJ45头的制作为例,采用T568B标准)
(1)准备
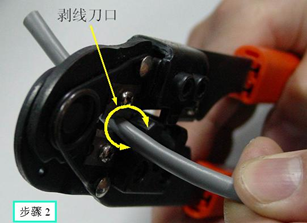
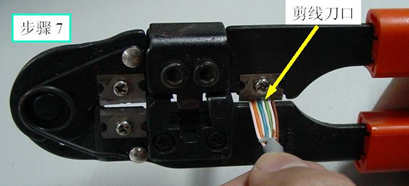
(2)准备剥线
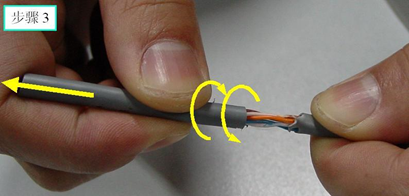
(3)剥线
(一)
(二)
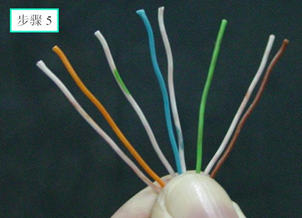
(三)
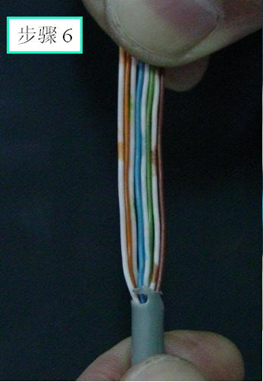
(四)
(五)
(六)
(4)放入RJ45插头
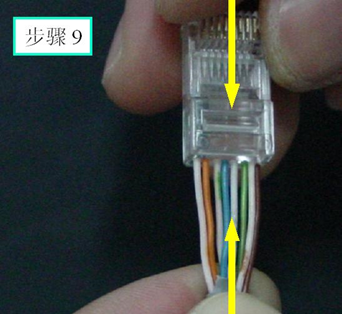
(5)准备压实
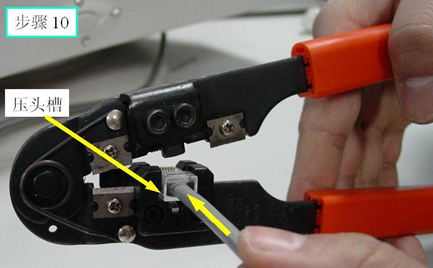
(6)压紧
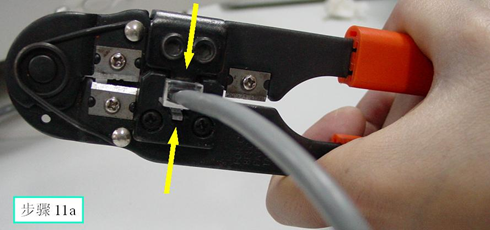
(一)
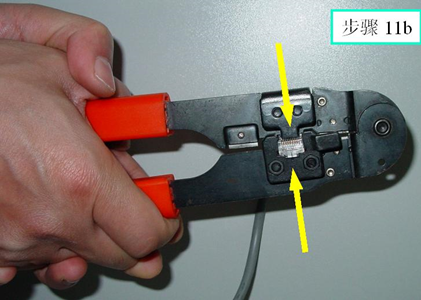
(二)
(7)完成

(8)测试并完成PC机与Hub的连接
完成双绞线的两端RJ45头的制作后,通过RJ45测线仪测量网线是否接线正常。


而后,将同组的PC机接入Hub,组成一个局域网。
实验要求:完成实验,把实验过程截图,并写出实验心得。

