
2.2.1 矢量数据模型
1. 矢量数据模型的概念
矢量数据模型是一种通过记录空间“坐标对”的方式,以点、线、面等形式来描述空间目标对象位置,以标识符表达对象属性的一种数据模型。
2. 矢量数据模型的表达
(1)零维矢量
零维矢量即空间中的一个点,通常用来描述抽象的点状实体,如一个钻孔、一个城市。在数学上,点没有大小、方向。
(2)一维矢量
一维矢量即空间的一条线,通常用来表示空间中的线要素,如公路和河流;或者用来描述空间对象之间的边界,也称为弧段、链。一维矢量有长度,但没有宽度和高度。在二维欧氏空间中用一组离散的实数点对来表示一维矢量.
(3)二维矢量
二维矢量即空间中的一个面,通常用来表示空间中的面状要素,如岛屿、湖泊、地块、行政区域等。在二维欧氏空间中它是指由一组弧段所围成的闭合区域,也称为多边形。在三维欧氏空间中二维矢量为空间曲面。
(4)三维矢量
三维矢量是指三维空间中的实体,是由一组或多组空间曲面所包围的空间对象,它具有体积、长度、宽度、高度、空间曲面的面积、空间曲面的周长等属性,如对建筑、矿体等三维目标的表述。
3. 矢量数据模型的特征
(1)定位明显、属性隐含
(2)形象直观
(3)特别适合模拟离散的空间数据
(4)精度高
4. 矢量数据的获取
(1)利用各种定位仪器设备获取
(2)以硬拷贝数据方式获取
(3)通过间接转换的方式获取
2.2.2 栅格数据模型
1. 栅格数据模型的概念
栅格数据模型是一种用规则排列的像元阵列来描述空间目标对象的数据模型。在栅格数据模型中,对空间实体的最小表达单位为一个像元或像素(Cell或Pixel),依行列构成的像元阵列称为栅格(Grid)。栅格像元最常用的形状是正方形,但也可能是长方形、三角形或六边形。
2. 栅格数据模型的表达
在栅格模型中,点表现为具有一定数值的栅格像元;线表现为按线形特征相连接的一组相邻像元,每个栅格像元最多只有两个相邻像元在线上;面表现为按二维形状特征连续分布的一组像元,每个栅格像元可以有多于两个的相邻单元属于同一区域。
3. 栅格数据模型的特征
(1)属性明显,定位隐含
(2)像元的大小直接影响空间数据表达的精度以及数据的处理时间和存贮空间
(3)像元大小对精度的影响主要表现为位置的移动、形状的畸变以及属性的偏差
(4)特别适合模拟连续的空间数据
4. 栅格数据的获取
(1)通过遥感方式获取
(2)规则点采样、不规则点采样及插值
(3)通过扫描仪、摄像机等设备获取
(4)通过间接转换获取
5. 栅格像元属性的决定方式
(1)主要类型法
若某一特征值是该栅格像元内的主要类型,则把该值赋给这个像元。
(2)中心点法
每一栅格像元的值由占据该像元中心的特征值决定。由于像元中心点相对于各要素而言具有随机性,所以各种类型的多边形的面积误差都不会很大。该方法可以用于离散的或连续的数据,但尤其适用于连续数据的编码。
(3)重要性法
根据栅格像元内不同特征值的重要性,选取最重要的特征值作为该栅格像元的属性值。重要性法常用于具有特殊意义而面积较小的地理要素,特别是点状、线状地理要素,如城镇、交通线、河流水系等。
(4)长度占优法
每个栅格像元的值以网格中线(水平或垂直)在不同面域中的最长部分对应的面域特征值来确定。
(5)比例分成法
根据栅格像元内不同特征值所占面积的比例(常用百分比、万分比来表示)来确定该像元的属性值。与前述几种方法相比,该方法最大的不同在于每种类型的要素需要单独生成一个栅格数据,各栅格数据中每一个像元的值源于该类型要素在本像元中所占的面积比例。由于该方法无面积信息损失,故常用在对面积等属性精度要求较高的情况。
2.2.3 不规则三角网模型
不规则三角网(Triangulated IrregularNetwork,TIN)模型采用一系列相连接的三角形拟合地表或其他不规则表面,常用来构造数字地面模型(DTM),特别是数字高程模型(DEM)。
生成TIN的一般方法是:首先取任意一点P1,在其余各点中搜寻与此点最近的点P2,连接P1与P2构成第一条边;然后在其余所有点中寻找与这条边最近的点,找到后即可构成第一个多边形;以三角形新生成的两边为底边,在其余各点中分别寻找它们最近的点构成第二个、第三个三角形;依此类推,直到把所有的点都连入三角网中(图2.27)。
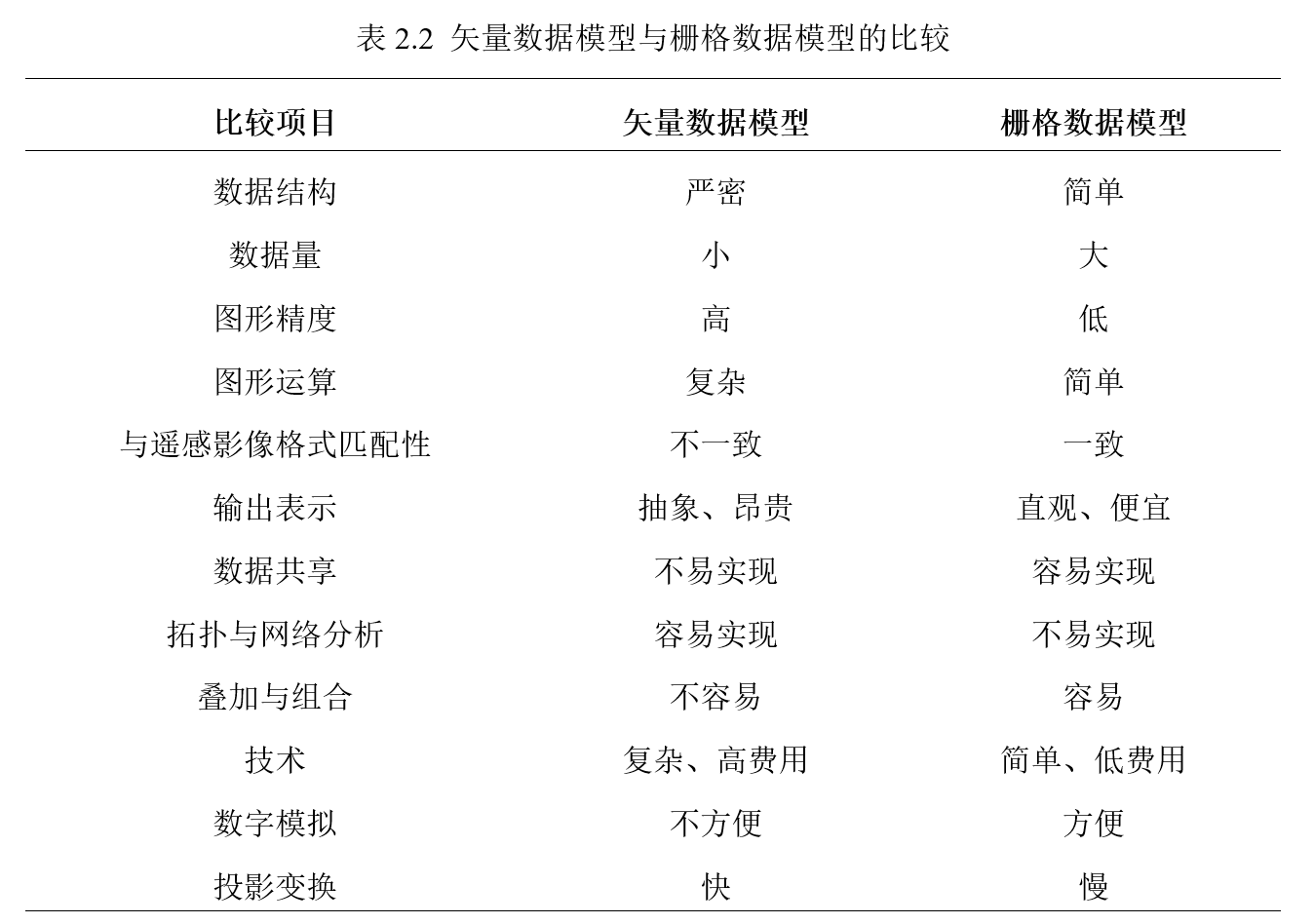
2.2.4 矢量数据模型与栅格数据模型的比较
本节视频

