
3.5 信号检测的性能
从前面的讨论可看出:不同准则的“最佳”性能指标,都与错误判决概率P(H1|H0)、正确判决概率P(H1|H1)有关,对此判决概率作进一步讨论。
似然比检验的判决表示式为
 (3.5.1)
(3.5.1)
因为似然比函数亦是一随机变量,也就有自己的概率密度函数,根据概率论中的有关理论,似然比概率密度函数与观测信号的概率密度函数的关系有

所以,判决概率可以表示为:
 (3.5.2)
(3.5.2)
 (3.5.3)
(3.5.3)
显然,通过检测门限η,可将判决概率联系起来。
通常,似然比检验是可以化简的,结果的一般形式为:
或
 (3.5.4)
(3.5.4)
这样,判决概率又可表示为
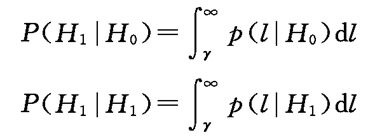
或
举例说明(见讲义P89---P93) :
以例3.3.1中的结果,检验统计量为

检测门限为
 (3.5.10)
(3.5.10)
在假设H0、H1下,l(x)均服从高斯分布,可得到其判决概率为
![]() (3.5.11)
(3.5.11)
 (3.5.12)
(3.5.12)
其中d 2为功率信噪比:
 (3.5.13)
(3.5.13)
而

称为幅度信噪比。
判决概率如图3.11所示
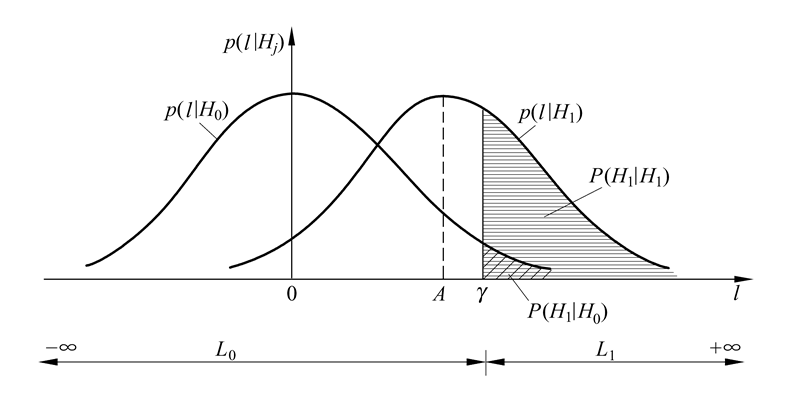
图3.11判决概率P(H1|H0)和 P(H1|H1)示意图
利用参数η和d,把PD=P(H1|H1) 和PF=P(H1|H0)联系起来用图形表示,得到PD~PF曲线,即为接收机工作特性曲线(ROC)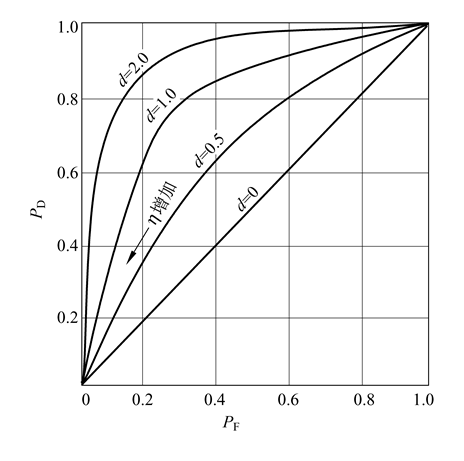
图3.12接收机工作特性(ROC)
常把PD~PF曲线改为PD~d曲线,而以PF作参变量,即为检测特性曲线(检测概率与信噪比的关系曲线)。
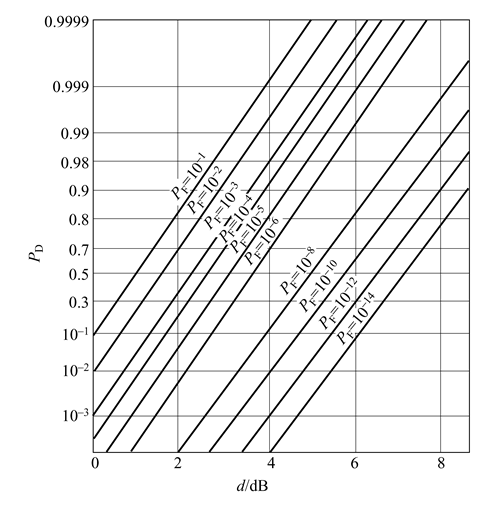
图3.13检测概率PD与信噪比d的关系
如果λ(x)是 x 的连续函数,则接收机工作特性有共同特点。
(1)所有连续似然比检验的接收机工作特性都是上凸的。
(2)所有连续似然比检验的接收机工作特性均位于对角线PD=PF之上。
(3)接收机工作特性在某点处的斜率等于该点上PD和PF所要求的检测门限η .
检测系统接收机工作特性可用于各种准则的分析和计算。如图3.14所示。
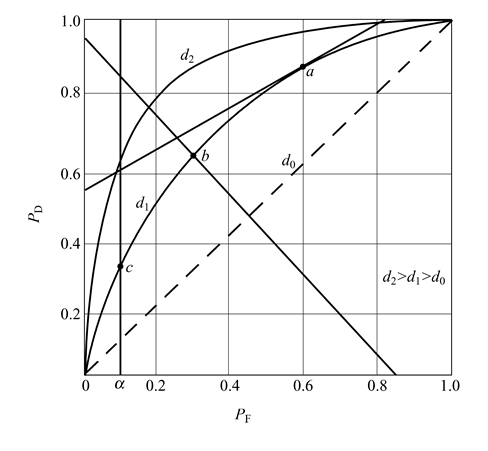
图3.14接收机工作特性在不同准则下的解
所以说,检测系统接收机工作特性是似然比检验性能的完整描述.

