
1.什么是控制
控制科学与工程在本科阶段称为“自动化”,研究生阶段称为“控制科学与工程”。本学科是研究控制的理论、方法、技术及其工程应用的学科,以控制论、系统论、信息论为基础,研究各应用领域内的共性问题,即为了实现控制目标,应如何建立系统的模型,分析其内部与环境信息,采取何种控制与决策行为;而与各应用领域的密切结合,又形成了控制工程丰富多样的内容。
2.控制系统类型
1、开环控制系统
简单的说就是没有反馈的系统。生产过程的状态没有影响计算机控制的系统,计算机\控制器\生产过程等环节没有构成闭合环路,则称之为计算机开环控制系统。生产过程的状态没有反馈给计算机。

图【1】开环控制系统
2、闭环控制系统
简单的说就是有反馈的系统,有些是正反馈有些是负反馈。
计算机对生产对象或过程进行控制时,生产过程状态能直接影响计算机控制的系统,称之为计算机闭环控制系统。
在这样的系统中,控制部件按控制机发来的控制信息对运行设备进行控制,另一方面运行设备的运行状态作为输出,由检测部件测出后,作为输入反馈给控制计算机;从而使控制计算机-控制部件-生产过程-检测部件构成一个闭环回路。我们将这种控制形式称之为控制计算机闭环控制。

图【2】闭环控制系统
3.常用的控制芯片
现阶段我们能用到的控制芯片一般有以下几种
51系列芯片

51单片机是对兼容英特尔8051指令系统的单片机的统称。51单片机广泛应用于家用电器、汽车、工业测控、通信设备中。因为51单片机的指令系统、内部结构相对简单,所以国内许多高校用其进行单片机入门教学。
一般我们刚开始学习的时候学的就是这款芯片,这款芯片学习比较简单,主要是对底层寄存器的操作,没有过多的库函数,便于入手。
现阶段我们使用的51芯片一般是有国内的宏晶公司制造的STC89C51和STC89C52系列的芯片。宏晶公司网址:http://www.stcmcudata.com/
STM32芯片

STM32系列专为要求高性能、低成本、低功耗的嵌入式应用设计的ARM Cortex®-M0,M0+,M3, M4和M7内核主流产品(STM32F0、STM32F1、STM32F3)、超低功耗产品(STM32L0、STM32L1、STM32L4、STM32L4+)、高性能产品(STM32F2、STM32F4、STM32F7、STM32H7)
一般我们学习完51单片机,便会学习这款单片机,这款控制芯片应用广泛,应用案例众多,参考资料丰富。一般有三种开发方式。
寄存器开发方式
直接控制寄存器,比较麻烦
库函数开发方式
使用ST公司提供的官方库函数开发程序,实现控制
HAL库开发
使用ST公司开发的STM32 CubeMX开发
一般我们使用库函数开发方式去实现控制。此芯片我们使用的一般是ST公司生产的,ST公司中文名称是意法半导体,是意大利的一家半导体公司
公司网站地址:世意法官网 (st.com)
MSP430芯片

这款芯片是美国的德州仪器设计的。德州仪器(TI)是人类历史上第一款集成电路的设计者。通常情况下我们用不到这款芯片。在TI杯中的控制题可能会要求使用这款芯片
4.控制算法
PID控制算法
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点

我们通常使用的PID算法有以下两种:
位置式PID
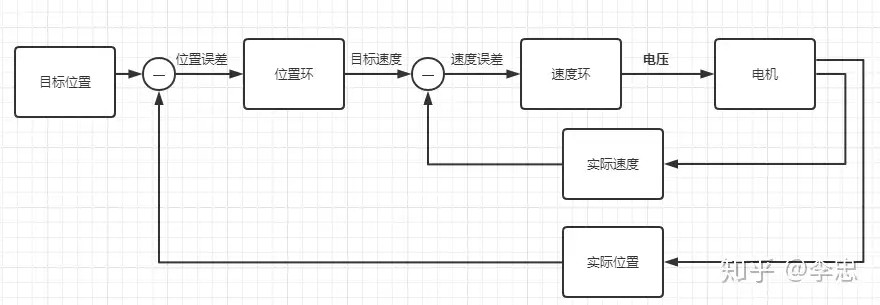

位置环的作用是控制电机平缓的到达目标位置,其运用了位置式PID,其输入的是电机反馈的实际位置。
输入:位置误差=目标位置-实际位置 输出:目标速度
注:
位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,也即是积分饱和问题
位置式PID需要用到以前的每一个数据,计算量较大
增量式PID
比例P : e(k)-e(k-1) 当前误差 - 上次误差
积分I : e(i) 当前误差
微分D : e(k) - 2e(k-1)+e(k-2) 当前误差 - 2*上次误差 + 上上次误差
增量式PID根据公式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量而得出的控制量
▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差 没有误差累加也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作
试凑法确定 PID 控制器参数
试凑法是根据控制器各参数对系统性能的影响程度,边观察系统的运行边修改参数直到满意为止
增大比例系数 Kp 会加快系统的响应速度,有利于减少静差。但过大的比例系 数会使系统有较大的超调,并产生振荡使稳定性变差
减小积分系数 Ki(Ki=KpT/Ti将减少积分 作用,有利于减少超调使系统稳定,但系统消除静 差的速度慢,
增加微分系数 Kd(Kd=KpTd/T)有利 于加快系统的响应,是超调减少、稳定性增加,但对干扰的抑制能力会减弱.
步骤
确定比例系数 Kp,在确定比例系数 Kp 时,首先去掉 PID 的积分项和微分项,可以令 Ti=0,Td=0。使之成为纯比例调节.输入设定为系统允 许输出最大值的60%~70%。
- 比例系数 Kp 由0开逐渐增大,直至系统出现振荡。
- 再反过来从此 时的比例系数 Kp 逐渐减小,直至系统振荡消失。
- 记录此时的比例系数 Kp,设定 PID 的比例系数 Kp为当前值的60%~70%
确定积分时间常数Ti;
- 在比例系数Kp确定之后,设定一个较大的积分时间常数Ti
- 然后逐渐减小Ti,直至系统出现振荡,再反过来,逐渐增大Ti
- 直至系统振荡消失,记录此时的Ti,设置Ti为当前值的150%~180%
确定微分尝试Td
确定Kp的方法相同,取其不振荡时值的30%
2.卡尔曼滤波算法

