
机器歌舞
结合音乐节奏和表情生成,将智能机器人行为控制方法运用到机器人歌舞之中,就可以开展有关机器歌舞的研究工作。能够进行歌舞的智能机器人主要属于仿人机器人,由于仿人机器人更加适应人类活动的场所环境、行为方式也符合人类的习惯并能够给人以亲近感,因此自上个世纪七十年代以来,就不断有产品面世。
最早开展机器歌舞表演的是在2003年,日本索尼公司研制的ORIO,就是第一台可以漫步、歌舞,甚至指挥乐队的仿人机器人。我们实验室购买的法国NAO机器人也是比较先进的仿人机器人,采用这种机器人,也可以开展有关机器歌舞方面的研究工作。

日本开发的歌舞机器人
歌舞动漫仿真
机器歌舞主要是基于情感模式分析开展有关舞蹈创作计算模型及其机器表演实现、汉语歌曲自动朗诵、哼唱、歌唱等不同形式演唱的计算模型及其机器表演实现,以及歌舞综合机器表演系统方面的研究。具体实现方案分为两个阶段,首先主要研究以动漫人物的虚拟舞蹈动画来表现音乐形象,是音乐的一种可视化的实现形式与解决;然后实现以音乐为驱动并结合音乐自身所包含的情感特性,通过动漫人物的面部表情、舞蹈动作等表现形式,演绎音乐的内涵。 将虚拟的动漫歌舞表现嵌入到机器人系统中,与智能控制技术相结合,完成真实的机器歌舞表演。为此,需要完成音乐解析模块、音乐情感检测和标注模块、舞蹈动作关联分析模块、音乐舞蹈匹配模块、动漫人物展示模块以及歌舞动作控制模块。
歌舞动漫的主要研究环节
机器歌舞创作
目前,仿人机器人歌舞存在的主要问题是:(1)没有考虑人类歌舞专业人员学习和创作歌舞的规律;(2)仅仅学习歌舞动作本身,而不是像人类歌舞专业人员一样通过想象来创新歌舞动作;(3)没有考虑歌舞创新和传承之间的平衡问题;(4)缺乏一种通用的仿人机器人歌舞智能学习与创作模型,可以应用于任意仿人机器人硬件平台上完成优美歌舞的学习和创作。
解决上述问题,可以借鉴人类歌舞专业人员学习和创作歌舞的规律,提出了如下一种仿人机器人通用的歌舞模型,如下图所示。仿人机器人智能歌舞主体是一个介于外部环境和具体仿人机器人硬件平台之间的独立的智能主体。图中的模型首先建立一个仿人机器人歌舞表征空间,包括了关节、肢体、歌舞元素、歌舞特征约束、舞姿、歌舞的形式化表示方法。
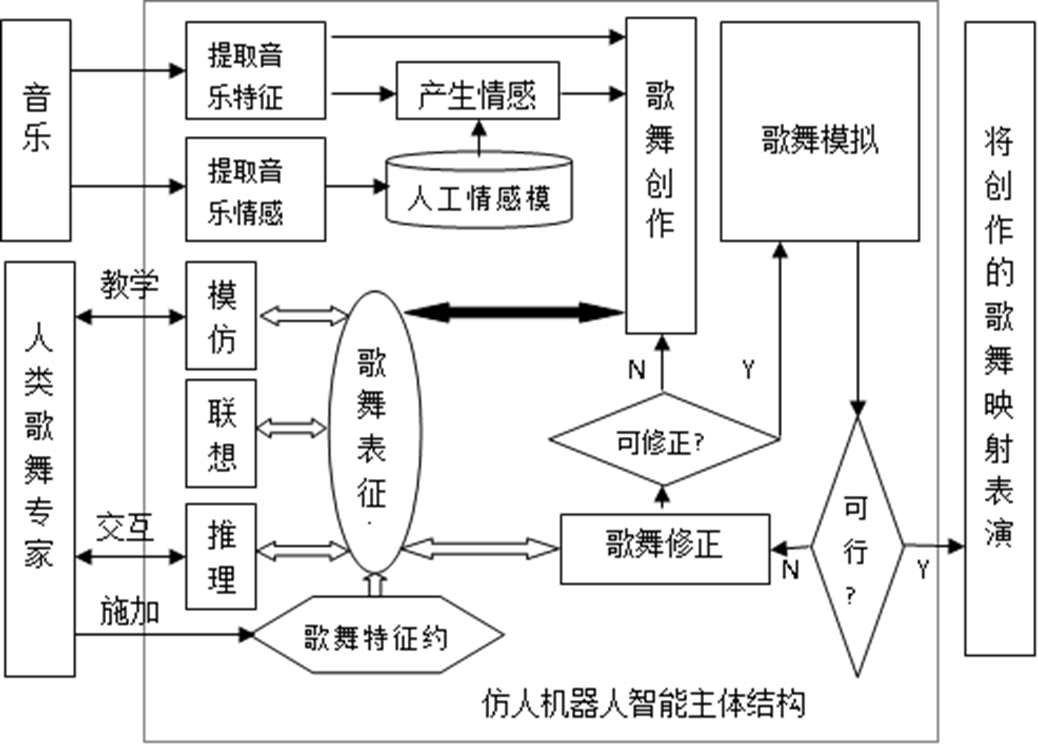
仿人机器人通用歌舞创作模型

