
行为控制
在智能科学技术领域,行为控制主要是指智能机器人的运动控制问题,大约包括智能机器人导航、路径规划、智能行为规划与执行等内容。当然运动与视觉协调密切相关,因此运动控制常常与主动视觉与目标跟踪相互配合,需要考虑选择性注意计算模型的有机融合问题,这也是行为控制的一个难点。
导航行为控制
人类眼球运动可以通过断续性扫视、平稳性跟踪以及辐射运动等形式来保持对视觉目标的主动跟踪。对于机器人而言,这里需要解决二个问题,一是注意选择问题,即如何选择跟踪的目标,二是保持目标的跟踪问题。这些都是主动视觉研究的问题,在根据外界环境变化来不断调整自己行为的控制,起着重要作用。
具备一定的视觉能力,机器自动导航需要解决的问题分解开来有这样三点:(1)现在何处?(2)要往何处去?(3)如何去?相当于说给定出发点、目的地以及路径,因此机器人自动导航问题主要是一个路径规划问题。
目前解决这样一个问题的主要环节大致有:地图构建、定位、路径规划,以及躲避障碍等方面。(1)地图构建:明确机器人活动范围的整体路线及其各种坐标参考标志物;(2)定位:通过一定的检测手段来获取机器人在空间中的位置、方向以及环境信息,并通过据此建立动态环境模型;(3)路径规划:寻找最优或极优无障路径,引导机器人安全移动到达目的地;(4)躲避障碍:给出灵活躲避障碍的策略,特别是非固定障碍的躲避策略。
机器人自动导航是机器行为控制中的核心技术之一,也是移动机器人的基础技术。尽管已有大量研究工作,却依然是一项具有挑战性的研究课题,特别是对于开放环境,更是如此。可以用于机器人自动导航的传感器主要包括磁场导航仪、惯性检测仪、激光测距仪、视觉摄象机、磁场罗盘仪、光电编码器、超声测距仪、红外测距仪、里程计等等。
视觉导航系统主要通过视觉传感器(又包括双目立体视觉、单目普通视觉、红外成像视觉等)对障碍和路标进行探测、识别与分析,来进行路径选择,完成导航任务,因此其中的路标检测、障碍规避以及路径跟踪就成为主要的组成部分。而非视觉导航系统则是通过其他探测手段来进行导航,比如激光、超声、磁场等。目前更多的导航系统是两种技术的混合,兼顾视觉与非视觉各自的优点。
研制仿人机器
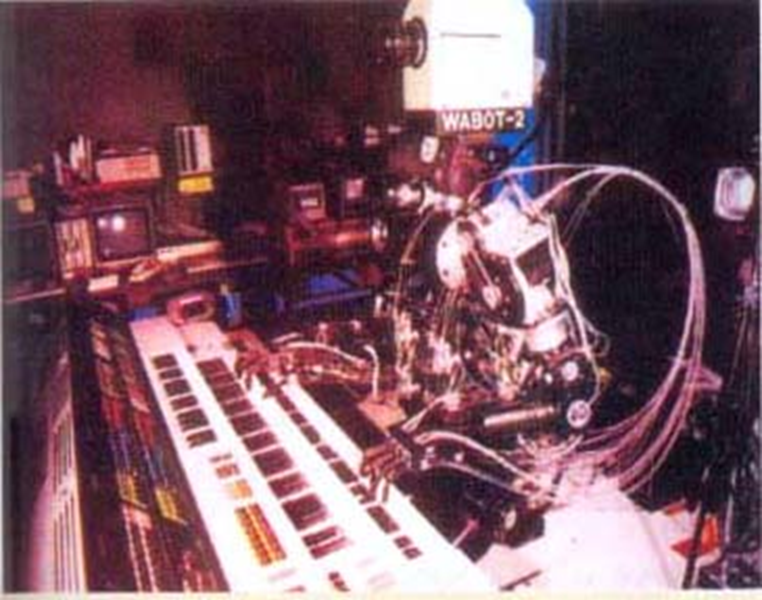
最早开发的仿人机器人是日本早稻田大学加藤一郎研究室开发的WABOT-1型机器人(1973年),后来该研究室又开发了能够演奏钢琴的WABOT-2型仿人机器人(1984年)
仿人机器人研究的新突破则是1996年由日本本田技研公司经10年精心打造的P2仿人机器人(身高180cm、体重210kg),也是世界上首台能用双足稳步行进的仿人机器人,并在1997年进一步研制除了改进版P3(身高160cm,重130kg)。
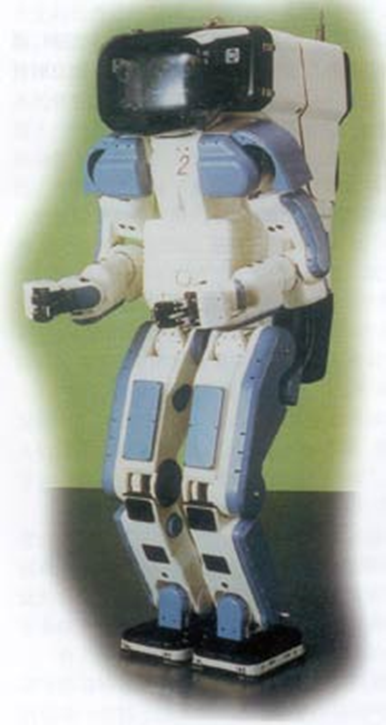
到了2000年,日本本田公司又开发的ASIMO仿人机器人(身高120cm,重43kg),可遥控、双足、能运动。右图给出的就是这新型的仿人机器人。仿人机器人的自由行走,甚至跑步,是一个难题,在这方面有所突破是有重要意义的。


