时序系统与控制方式
时序系统
(1)指令周期:是指从取指令、分析取数到执行完该指令所需的全部时间。各种指令的指令周期不尽相同。
(2)机器周期:又称CPU周期。通常把一个指令周期划分为若干个机器周期,每个机器周期完成一个基本操作。一般机器的CPU周期有取指周期、取数周期、执行周期和中断中期等。
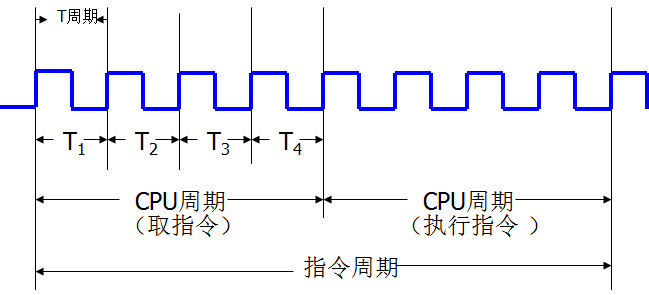
图6.3-1 指令周期和机器周期的关系
每个机器周期都有一个与之对应的周期状态触发器。
许多计算机系统以主存的工作周期(存取周期)为基础来规定CPU周期。
CPU访问主存也是一次总线传送,因此也称为总线周期
(3)节拍:
在一个机器周期中,要完成若干个微操作。把一个机器周期分为若干个相等的时间段,每一个时间段对应一个电位信号,称为节拍电位信号。节拍选取的常用方法:
统一节拍法:以最复杂的机器周期为准定出节拍数,每一个节拍时间的长短以最繁的微操作作为标准。采用统一的、具有相等时间间隔和相同数目的节拍,是的所有的机器周期长度都是相等的。因此也称为定长CPU周期。
分散节拍数:按照机器周期的实际需要安排节拍数。由于各机器周期长度不同,也成为不定长CPU周期。
延长节拍法:在照顾多数机器周期要求的情况下,选取适当的节拍数,作为基本节拍。如果在某个机器周期内统一的节拍数无法完成该周期的全部微操作,则可以延长一或两个节拍。
时钟周期插入:在一些微型计算机中,时序信号中不设置节拍,直接使用时钟周期信号。一个机器周期中含有若干个时钟周期。
(4)工作脉冲
在节拍中执行的某些微操作需要同步定时脉冲,如将稳定的运算结果打入寄存器,在一个节拍内常常设置一个或几个工作脉冲,作为各种同步脉冲的来源。
在只设置机器周期和时钟周期的微型计算机中,一般不再设置工作脉冲,因为时钟周期既可以作为电位信号,其前沿、后沿又可以作为脉冲触发信号。
(5)多级时序系统
在小型计算机中,每个指令周期中常采用机器周期、节拍、工作脉冲三级时序。在微型计算机中,一个指令周期包含若干个机器周期,一个机器周期包含若干个时钟周期。
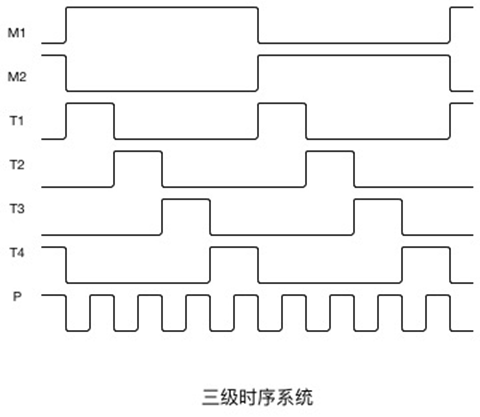
图6.3-2 三级时序系统
(6)节拍电位和工作脉冲的时间配合关系
节拍电位是信息的载体,即控制信号,在数据通路传输中起着开关的作用;•工作脉冲则作为打入脉冲加在触发器的脉冲输入端,起到定时触发的作用。
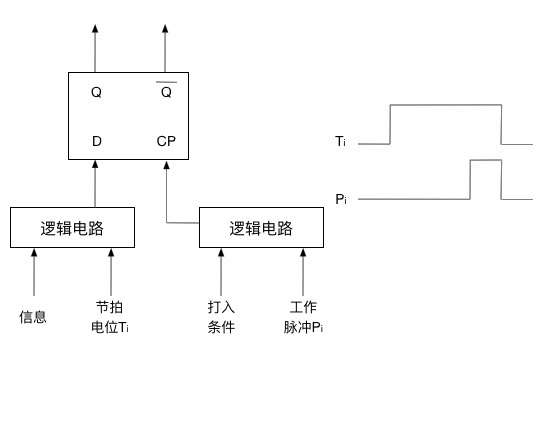
图6.3-3 节拍电位和工作脉冲的配合关系
时序信号产生器的组成
(1)时钟源:用来为环形脉冲发生器提供频率稳定且电平匹配的方波时钟脉冲信号。它通常由石英晶体振荡器和与非门组成正反馈振荡电路组成,其输出送至环形脉冲发生器。
(2)环形脉冲发生器:环形脉冲发生器的作用是产生一组有序的间隔相等或不等的脉冲序列,一遍通过译码电路来产生最后所需的节拍脉冲。
(3)节拍脉冲和读/写时序的译码:图6.2-3中的节拍脉冲信号是 ,在逻辑关系上与节拍脉冲
,在逻辑关系上与节拍脉冲 完全一致,是后者经过启停控制逻辑中与门以后的输出。
完全一致,是后者经过启停控制逻辑中与门以后的输出。
在组合逻辑控制器中,节拍电位信号是由时序产生器本省通过逻辑电路产生的,一个节拍电位持续时间正好包容若干个节拍脉冲。在微程序设计的计算机中,节拍电位信号可由微程序控制器提供。一个节拍电位持续时间,通常也是一个CPU周期时间。
(4)启停控制逻辑:机器一旦接通电源,就会自动产生原始的节拍脉冲信号 ,然而,只有在启动机器运行的情况下,才允许时序产生器发出CPU工作所需的节拍脉冲 。为此,需要由启停控制逻辑来控制 的发送。
启停控制逻辑的核心是一个运行标志触发器 .当运行触发器为“1”时,原始节拍脉冲 和读写时序信号
.当运行触发器为“1”时,原始节拍脉冲 和读写时序信号 ,
, 通过门电路发送出去,编程CPU真正需要的鸡排脉冲信号 和读/写时序
通过门电路发送出去,编程CPU真正需要的鸡排脉冲信号 和读/写时序 和
和 。反之,当运行触发器“0”时,就关闭时序产生器。
。反之,当运行触发器“0”时,就关闭时序产生器。
硬布线控制器中,时序信号采用主状态周期——节拍电位——节拍脉冲三级体制。一个节拍电位表示一个CPU 周期的时间,它表示了一个较大的时间单位;在一个节拍电位中又包含若歌节拍脉冲,以表示最小的时间单位;而主状态周期可包含若干个节拍电位,所以它是最大的时间单位。主状态周期可以用一个触发器的状态持续时间来表示。
微程序控制中时序信号采用节拍电位——节拍脉冲二级体制。它只有一个节拍电位,在节拍电位中又包含若干个节拍脉冲(T周期)。节拍电位表示一个CPU周期的时间,而节拍脉冲把一个CPU周期划分成几个较小的时间间隔。
控制方式:
(1)同步控制方式:也称固定时序控制方式,各项操作由统一的时序信号控制,在每个机器周期中产生统一数目的节拍电位和工作脉冲。设计检点,易于实现,对许多指令会有较多的空闲时间,造成浪费,影响指令的执行速度。
同步控制的特点:
①以微操作序列最长的指令为标准,确定控制微操作运行的节拍数;
②控制器产生统一的,顺序固定的、周而复始的节拍电位和工作脉冲;
③简单指令可空着一部分节拍不用。
(2)异步控制:可变时序控制方式,各项操作不采用统一的时序信号控制,需要多少时间,就设定多少时间。控制较为复杂采用不同的时序,没有时间浪费,提高机器效率
异步控制的特点:
①每条指令需要多少节拍,就产生多少节拍
②指令执行完毕,发出回答信号
③控制器收到回到信号即开始执行下条指令。
(3)联合控制方式: 这是同步方式和异步方式相结合的方式,现代计算机大多数是采用联合控制方式。通常的设计思想是:在功能部件内部采用同步方式或以同步方式为主的控制方式,在功能部件之间采用异步方式。