
CAN车身网的介绍
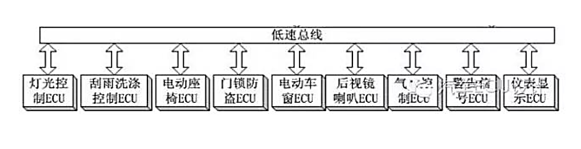
汽车车身网是用于控制汽车上用电管理、玻璃升降、防盗报警、碰撞安全等电控系统单元之间通信的一类低速网络,车身系统的控制对象多为低速和开关件,数量众多,对实时性要求低,因此需使用低速的低优先级和低通信量的低速车身控制系统总线连接这些电控单元。

若采用高速数据总线结构是不合理的,应将这部分电控单元与汽车的动力系统分开,有利于保证动力系统通信的实时性。此外,采用低速总线有利于增加传输距离、提高抗干扰能力以及降低硬件成本。
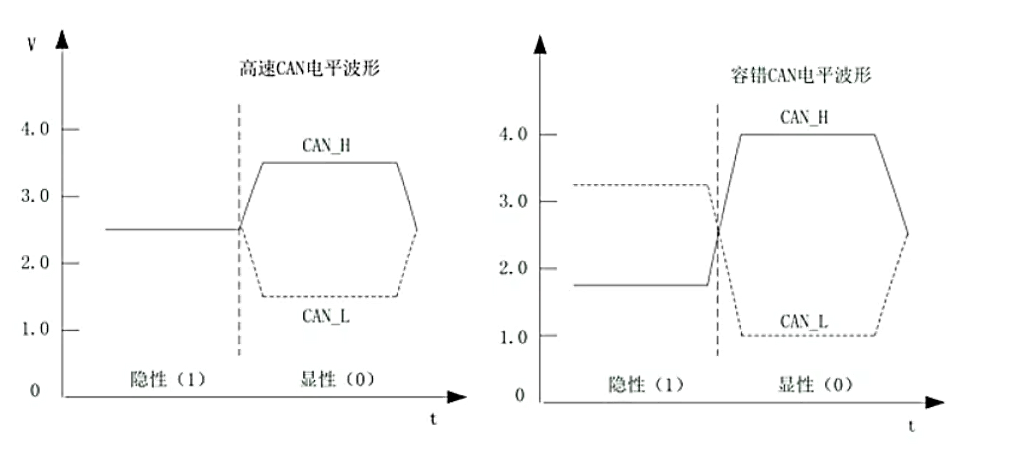
与高速CAN相同,低速CAN也采用双绞线连接,分别传递CAN-H和CAN-L的信号,只是低速CAN传递信号的速度大约在100kb/s左右,比高度CAN要慢很多,如果使用示波器测量其波形,也与高速CAN不同,同时在低速CAN中没有120欧姆的终端电阻,而是在每个控制单元中都有840欧姆或者12000欧姆左右的电阻。
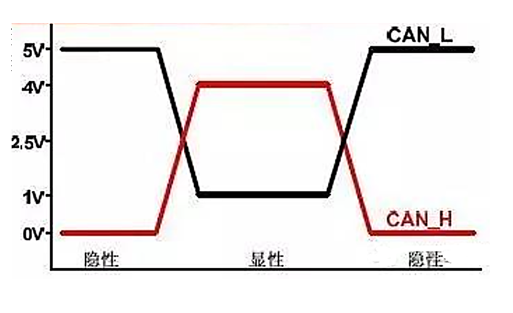
当没有信号时,CAN-L 大约为5V,而CAN-H为0V,当有信号产生时,CAN-L为1V,CAN-H为4V。其标准波形如下所示:
CAN车身网具有下面的特点:
1) 多主控制
当总线空闲时,连接到总线上的所有单元都可以启动发送信息,这就是所谓的多主控制的概念。先占有总线的设备获得在总线上进行发送信息的资格。这就是所谓的CSMA/CR(Carrier Sense MultipleAccess/Collosion Avoidance)方法如果多个设备同时开始发送信息,那么发送最高优先级ID消息的设备获得发送资格。
2) 信息的发送
在CAN协议中,所有发送的信息要满足预先定义的格式。当总线没有被占用的时候,连接在总线上的任何设备都能起动新信息的传输,如果两个或更多个设备在同时刻启动信息的传输,通过ID来决定优先级。ID并不是指明信息发送的目的地,而是指示信息的优先级。如果2个或者更多的设备在同一时刻启动信息的传输,在总线上按照信息所包含的ID的每一位来竞争,赢得竞争的设备(也就是具有最高优先级的信息)能够继续发送,而失败者则立刻停止发送并进入接收操作。因为总线上同一时刻只可能有一个发送者,而其它均处于接收状态,所以,并不需要在底层协议中定义地址的概念。
3) 系统的灵活性
连接到总线上的单元并没有类似地址这样的标识,所以,添加或去除一个设备,无需改变软件和硬件,或其它设备的应用层软件。
4) 通信速度
可以设置任何通讯速度,以适应网络规模。对一个网络,所有单元必须有相同的通讯速度,如果不同,就会产生错误,并妨碍网络通讯,然而,不同网络间可以有不同的通讯速度。
5) 远程数据请求
可以通过发送“遥控帧”,请求其他单元发送数据。
6) 错误检测、错误通知、错误恢复功能
所有单元均可以检测出错误(错误检测功能)。检测到错误的单元立刻同时通知其它所有的单元(错误通知功能)。如果一个单元发送信息时检测到一个错误,它会强制终止信息传输,并通知其它所有设备发生了错误,然后它会重传直到信息正常传输出去(错误恢复功能)。
7) 错误隔离
在CAN总线上有两种类型的错误:暂时性的错误(总线上的数据由于受到噪声的影响而暂时出错);持续性的错误(由于设备内部出错(如驱动器坏了、连接有问题等)而导致的)。CAN能够区别这两种类型,一方面降低常出错单元的通讯优先级以阻止对其它正常设备的影响,另一方面,如果是一种持续性的错误,将这个设备从总线上隔离开。
8) 连接
CAN总线允许多个设备同时连接到总线上且在逻辑上没有数目上的限制。然而由于延迟和负载能力的限制,实际可连接的设备还是有限制的,可以通过降低通讯速度来增加连接的设备个数。相反,如果连接的设备少,通讯的速度可以增加。

