2.2 地面站软件介绍
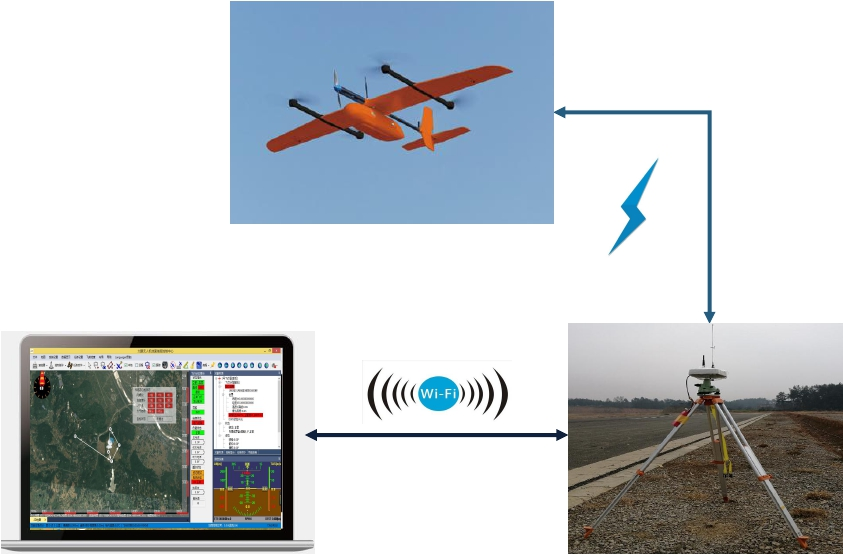
地面站软件CWCommander是整个无人机系统的指挥与
控制中心,是无人机系统自动驾驶仪的人机交互界面。地面站软件通过标准的通信指令协议(数据链接口DLI)与自动驾驶仪交互。
CWCommander软件
进入软件的步骤
1.连接地面站WIFI热点
查看地面站编号,确定WIFI热点名:GCS202-1909XXXX
地面站WIFI密码 :1909XXXX
2.打开地面站软件
双击图标
进入软件的步骤
3.设置通讯配置界面

选择通信方式: 网络通讯
服务器地址 : 10.10.100.254
端口号 : 2010
自驾仪类型 : 飞控
飞机类型选择: 选择对应飞机类型
点击“飞行任务规划与执行”进入软件的操作界面
通讯方式

Ø网络通讯TCP:通过地面站硬件共享WiFi网络并连接,实现地面站软件和硬件的连接
Ø 网络通讯UDP:广播通讯,无需建立连接,针对于外接链路设定
Ø串口通讯:通过RS422串口线实现地面站软件和硬件的连接
Ø文件回放: 可对之前飞行数据进行数据回放。(回放数据自动保存在地面站软件安装根目录下的
tel文件夹)
文件菜单
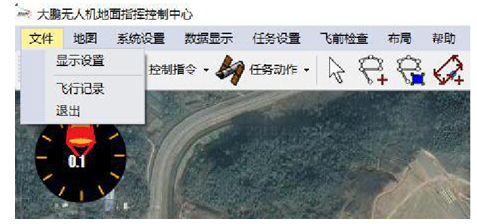
Ø 显示设置:包括显示单位设置、显示使用高度设置、电源报警设置、发动机油量显示设置等。
Ø 飞行记录:用于下载自驾仪记录数据。
Ø 退出:退出飞行任务规划与执行主界面。
地图菜单

导入地图图片:用户可将自己的高精度的地图图片叠加在相应区域。
地图类型:可在此选择使用不同的2D地图类型。默认使用谷歌卫星地图。
地图缓存管理:地面站软件联网状态可自动下载地图数据,断网状态可使用缓存数据。
地图跳转:用户可使用该项快速跳转到指定的经纬度位置。
地图版本号更新:用户可通过该项进行地图版本更新。
DEM数据管理:通过该项连接网络可进行在线下载高程数据,下载后可以进行高程查看
系统设置菜单
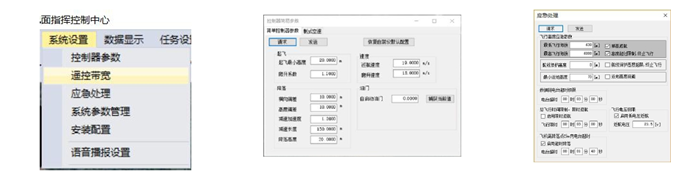
Ø 控制器参数:设置控制器参数和制式空速。
Ø 遥测带宽:设置遥测接收频率,默认2Hz,特殊情况可根据需求增加遥测频率。
Ø 应急处理:设置相应的应急参数。
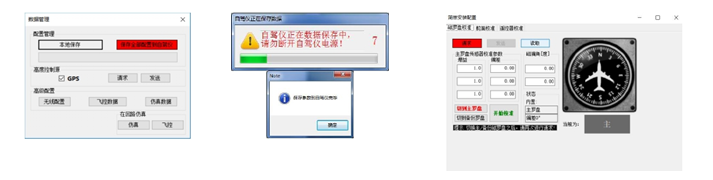
Ø 系统参数管理:用于修改自驾仪系统参数后的保存操作;
本地保存:可将自驾仪中的所有参数数据保存至本地目录;
保存全部配置到自驾仪:将修改后的参数保存至自驾仪(未经此保存的数据修改,在自驾
仪断电重启后将不会被保存)。
Ø 安装配置:进行磁罗盘校准、遥控器校准、舵面校准。
Ø 语音播报设置:设置语音播报参数。
数据显示菜单
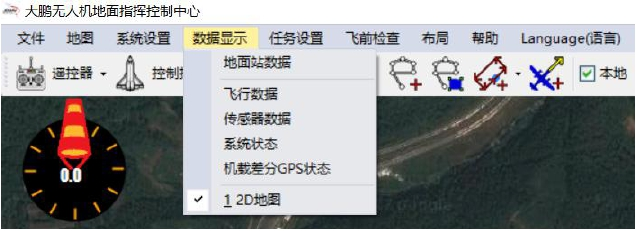
地面站数据:显示地面站系统状态和GPS信息。
飞行数据:实时显示遥测数据信息。
传感器数据:实时显示各主要传感器数据信息。
系统状态:显示系统运行时间、供电状态、主板温度、系统版本等数据。
机载差分GPS状态:显示Novatel差分GPS状态。
任务设置菜单
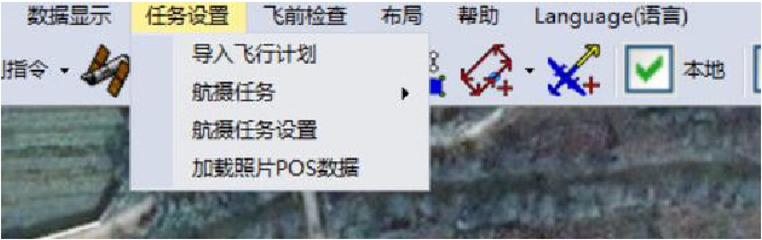
导入飞行计划:导入之前保存的航线(xml格式)。
航摄任务:测区的导入或清除;规划区的导入或导出及航路点的导出。
航摄任务设置:对拍照参数的修改及下载POS数据。
加载照片POS数据:航摄任务执行完成得到成果数据,其中照片POS数据是很重要的成果,加载该数据可快速检验航拍点的位置,检查是否有漏拍等现象。
飞前检查菜单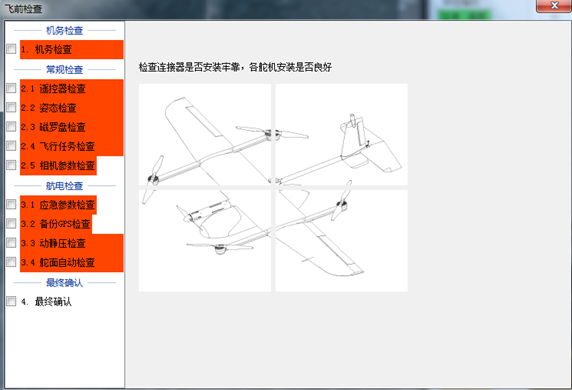
起飞前按照飞前检查事项及提示内容完成全部检查事项后,自驾仪“起飞”指令才能解锁。
指令工具栏

Ø 指令工具栏包括自驾仪开关、自驾仪控制指令及任务动作指令三部分。
Ø 自驾仪开关:选择“自驾仪”时(按钮为绿色),无人机系统为自动驾驶状
态,选择“遥控器”,无人机关闭自动驾驶,切换为姿态模式。
Ø 控制指令:用于下达起飞、降落和中止指令。
Ø 任务动作指令:用于发动机和接收机开关控制。
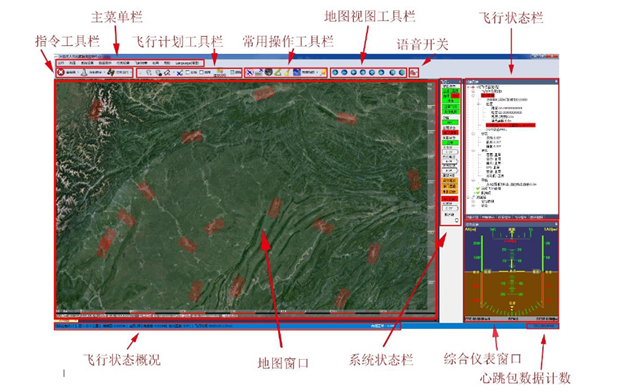
飞行计划、常用操作、地图视图工具栏

Ø 飞行计划工具栏:主要是规划飞行计划的各种指令,从左到右的指令分别是选择、新建飞行计划、新建航摄计划、新建降落计划、新建快速飞行计划、本地飞行计划显示框、远程飞行计划显示框、清空远程(一键清空远程飞行计划)及航线跟踪选项。
Ø 常用操作工具栏:包括 光电吊舱显示、 飞行器居中、显示飞行状态小标签、测距尺、清除航迹、高程剖面和标记。
Ø 地图视图工具栏:包括地图的缩放和移动操作,以及地图指北视图模式和飞行器航向视图模式的切换。
系统状态栏
Ø 状态指示:显示自动驾驶仪当前状态的关键信息(指示灯红色代表状态异常,绿色代表状态正常,橙色代表注意);
Ø 空速:飞行空速超过设置的空速范围,则显示为红色;
Ø 高度:飞行高度超过设置的海拔高度范围,则显示为红色;
Ø 直线:当前飞行状态,可显示直线,画圆,悬停;
Ø GPS:GPS不能给出正确的位置和速度数据则显示为红色,GPS处于备份状态,显示为橙色。
Ø 通讯:设置的应急处理数据链超时时间内没有收到遥测数据,则显示为红色;
Ø 系统:正常飞行,显示正常飞行[绿色],“横偏超限复飞”、“掉高返航”类异常情况将红色提示。
Ø 发动机状态:发动机启动状态为绿色灯,发动机熄火状态为红灯。
Ø 导航状态:GPS/INS:GPS信号正常,系统正常使用GPS/INS导航模式;
Ø AHRS:GPS信号不正常,系统切换为AHRS导航模式;
Ø 自驾状态:显示自动驾驶仪当前飞行模式。
Ø 负载状态:此功能暂时无用。
Ø 电源:显示自驾仪主电源、舵机电源及动力电源电压,电源电压低于报警电压,将显红色闪烁提示。
Ø 遥控状态:显示遥控器所处控制模式和电机是否解锁。
Ø RC显示:显示遥控状态,分为正常、断开、保护。
Ø 地面站:显示GCS-202电源电压。
Ø 照片数:RET为飞控给出的拍照信号。CMD为PPS记录的拍照数。
飞行状态栏
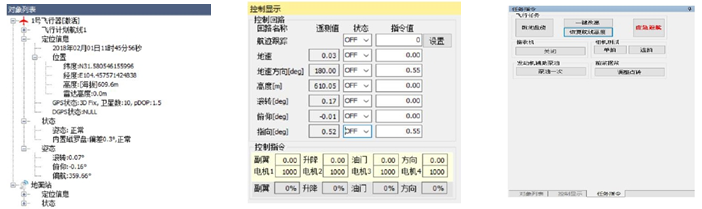
Ø 对象列表:显示飞行器和地面站信息,包括定位信息、姿态信息、状态信息、导航和地面站信息 ,异常数据将以红色背景提示。
Ø 控制显示:分别显示了控制回路、基本舵机值。
Ø 任务指令:包括飞行任务、任务动作、相机测试等任务指令。
综合仪表、地图窗口
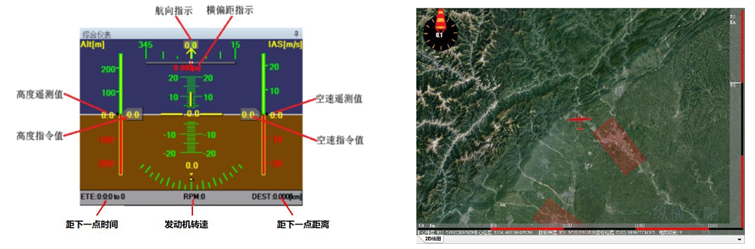
Ø 综合仪表:包含飞机基本飞行状态,地平仪显示飞行姿态。
Ø 2D地图窗口:显示地图数据信息及飞行计划和飞行航迹,地图下部显示地图中心经纬度 、鼠标指示位置经纬度及地图级别。
飞行状态概述、心跳包计数

Ø 飞行状态概述:显示当前应急点、横偏距、遥测指令高度差、板内温度和飞行时间以及 数据收发信号状态。
Ø 心跳包计数:表示地面站与自驾仪通讯数据数量。TX为地面站向自驾仪发送请求数据数量,RX为地面站接收自驾仪发送数据数量。
Ø 地面高程显示:接入带离线高程的Link100的飞机在授时定位之后地面站软件右下方会出现如图字样“地面高程正常”,并带有当前高度。只要地面站右下角不出现“访问超时”或者“高程无效”就表明Link100是合格的。高度数值计算公式为“当前海拔高度=地面高程数据+真高数据”,误差值在1m以内均正常。

