实操8 编程绘制标准心形(进阶)
上一节
下一节
实操8 编程绘制标准心形(进阶)
安全要求:速度<=20
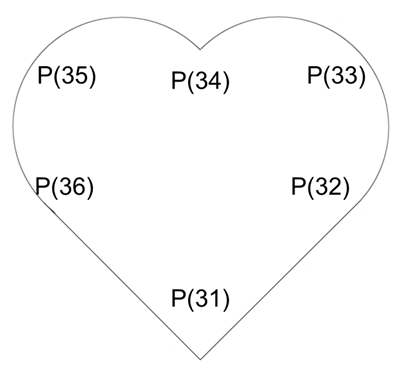
点位说明:
P(40):安全点
P(31):心形作业点
点位数据库只能保存以上两个点
P(31)到P(32)距离为:
1组:90 2组:106 3组:110 4组:98 5组:112 6组:100 7组:102 8组:120 9组:94 10组:118 11组:92