异步电动机在正交坐标系上的状态方程
-
1 本节目标
-
2 参考视频
-
3 参考课件
-
4 本节小结
上一节
下一节
本节目标:选择合适的状态变量,对正交坐标系上的数学模型进行简化。
学习思路:
状态变量有哪些?→选择原则是什么?→具体选择哪些?(两种选择方案,对应两种控制技术)
具体内容:
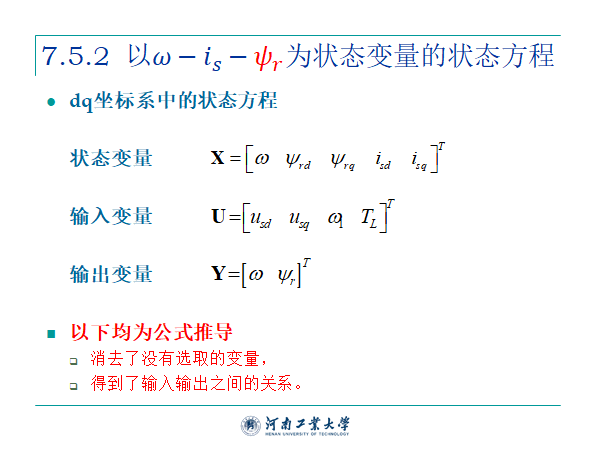
两种方案,两种坐标系,共有四种情况。仅以dq坐标系为例进行分析。
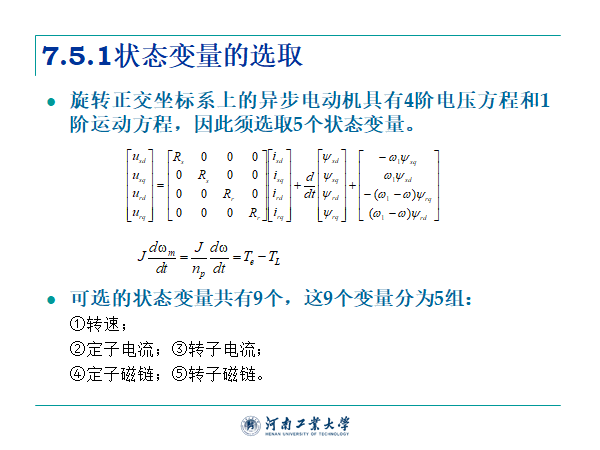
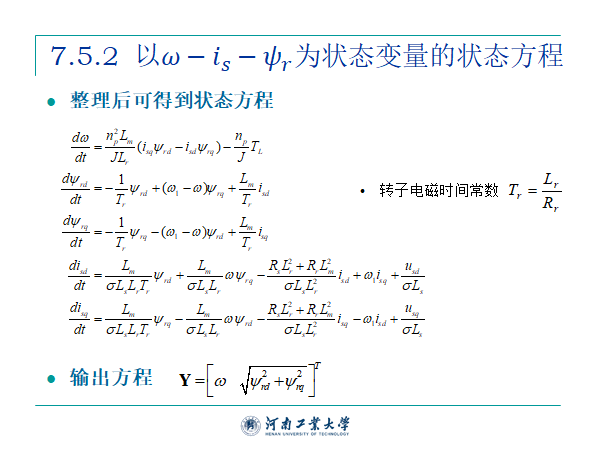
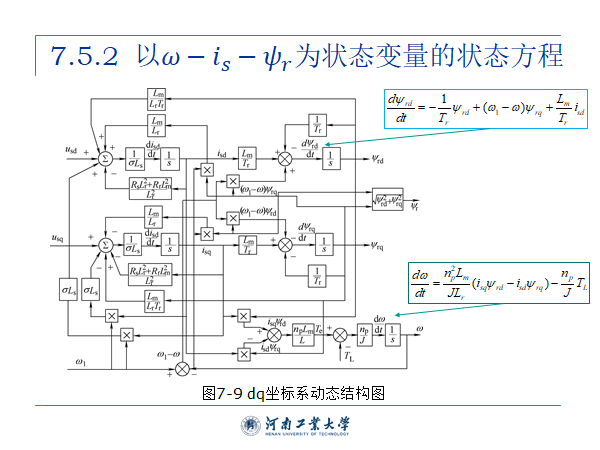
7.4.2节中方程表示的数学模型,改写为非矩阵形式,进行化简,并约掉非选择的状态变量。进而得到动态结构图7-9,整体上:看出了输入输出关系;局部上,可以以pusai_rd为例,分析结构图与公式之间的对应关系。