正交坐标系上的动态数学模型
-
1 本节目标
-
2 参考视频
-
3 参考课件
-
4 本节小结
上一节
下一节
知识目标:能够运用坐标变换,得出不同坐标系下电机的动态数学模型
学习思路:
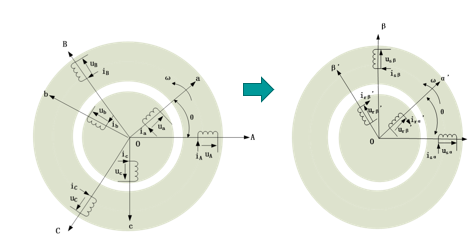
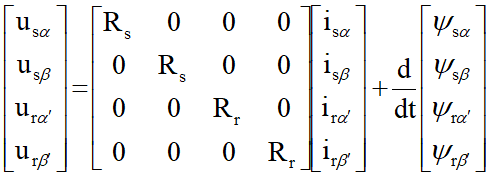
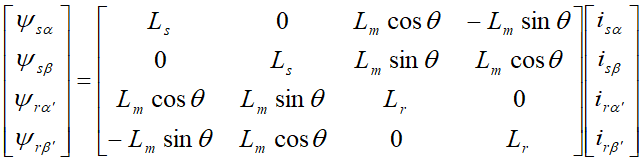
1、7.4.1.1节基于7.2节三相原始模型,经过3/2变换,得出定子 αβ 、转子α’β’坐标系下的数学模型。
2、7.4.1.2节,转子α’β’坐标系再进行旋转→静止变换,得出定子 αβ 、转子αβ静止坐标系下的数学模型。
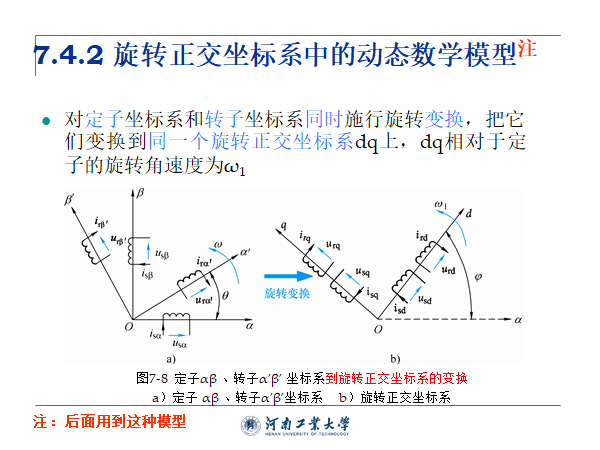
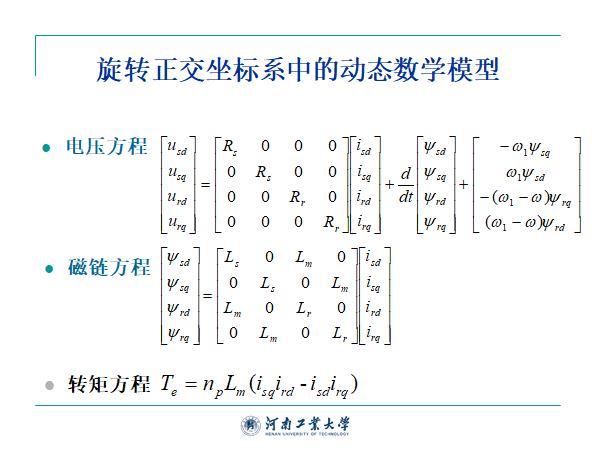
3、7.4.2节再进行旋转正交坐标系的变换,得到旋转正交坐标系中的动态数学模型。
进而7.6节通过调整旋转正交坐标系正方向,实现按照转子磁链定向的矢量控制。
思考:为什么要变换成两相坐标系上呢?
因为两相坐标系相互垂直,两相绕组之间没有磁的耦合。会使数学模型简单很多。