异步电动机的数学模型
-
1 本节目标
-
2 参考视频
-
3 参考课件
-
4 主题讨论
-
5 测试习题
-
6 本节小结
上一节
下一节
知识目标:
1、通过对交流电动机的数学模型性质的分析,认识到其控制的复杂性。
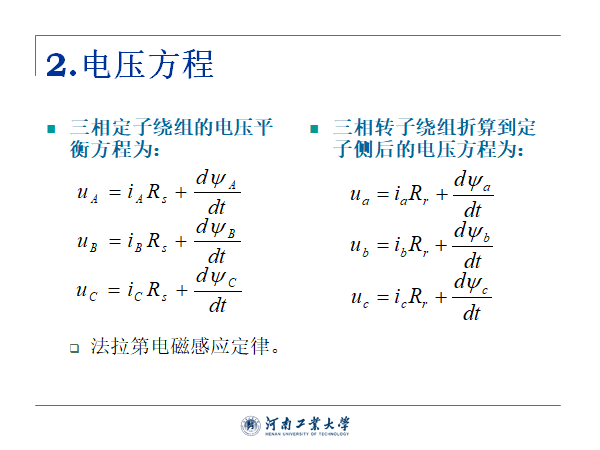
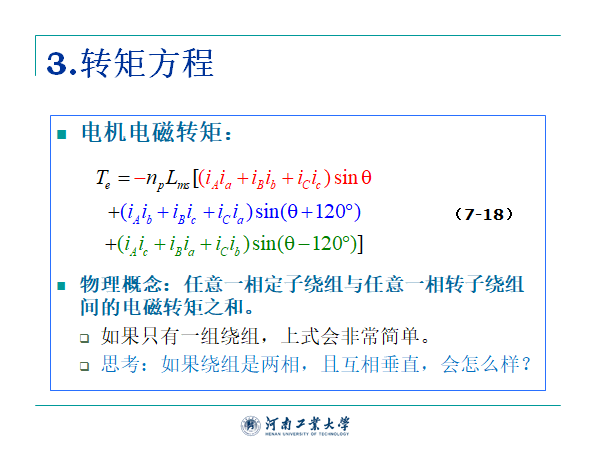
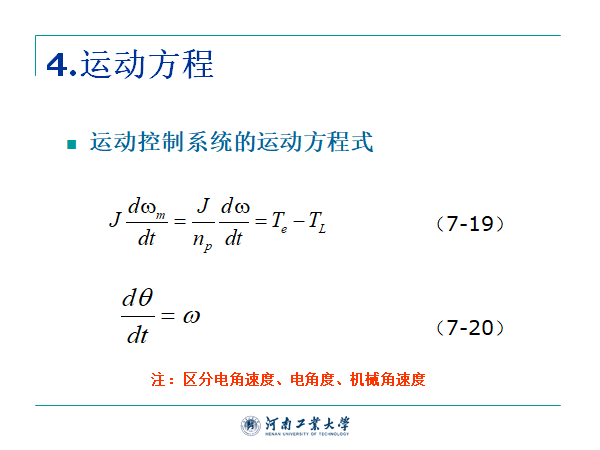
2、能够分析出三相异步电动机磁链方程,电压方程,转矩方程和运动方程。
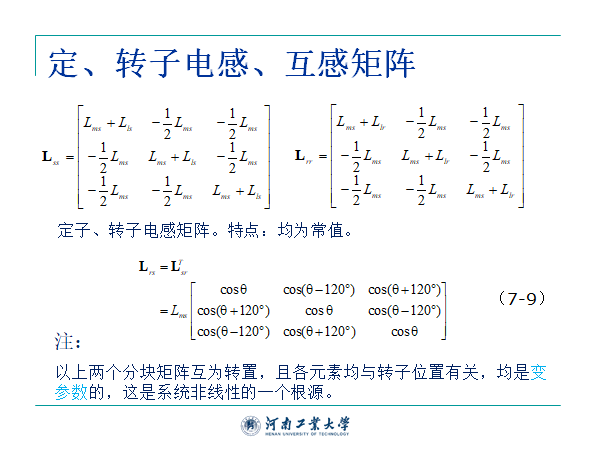
本节难点:磁链方程中的电感矩阵
本节重点:转矩方程