
Anti-lock Braking system for passenger car
Anti-lock braking systems (ABS ) are control devices within braking systems prevent the wheels from locking up during braking.
On initial brake, the brake pressure is raised: the brake slip λ increases and, at the maximum point on the adhesion/slip urve, it reaches the limit between the stable and unstable ranges . From this pointon, any further increase in brake pressure or brake torque does not cause any further increase in the brake force . In the stable range, the brake slip is largely deformation slip, it becoming increasingly skidding slip in the unstable range.
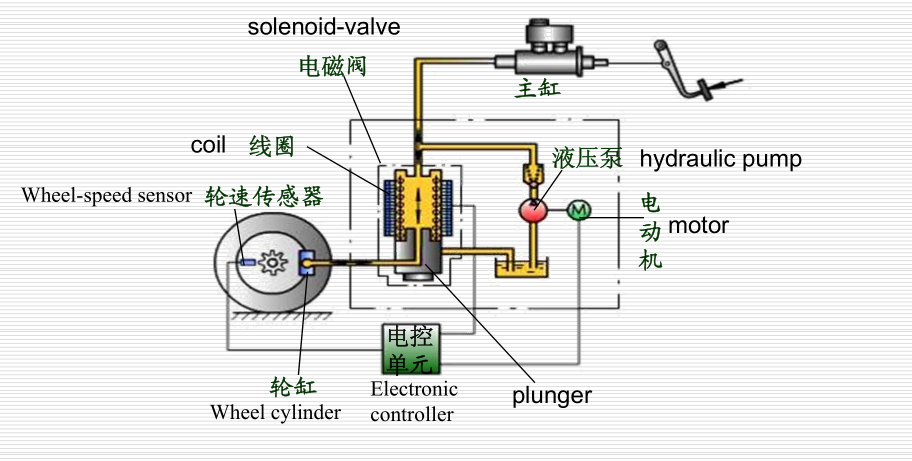
The wheel-speed sensor monitors the motion of the wheel. If one wheel shows signs of locking, there is a sharp rise in peripheral wheel deceleration and in wheel slip. If these exceed defined critical values, the controller sends commands to the solenoid-valve unit to stop or reduce the buildup of wheel-brake pressure until the danger of lock-up has passed. The brake pressure must then be built up again in order to ensure that the wheel is not under-braked. During automatic brake control, it is constantly necessary for the stability or instability of the wheel motion to be detected, and the wheel must be kept in the slip range with maximum brake force by a succession of pressure-buildup, pressure-reduction and pressure-holding phases.
A wheel-speed sensor consists of a toothed pulse ring and an inductive wheel-speed pickup. The pulse ring is mounted on the hub and , as the rotates, produces in the wheel- speed pickup an A.C. voltage, the frequency of which is proportional to the wheel speed.
From the signals from the wheel-speed pickups, these microcomputers calculate the wheel speeds as well as the wheel decelerations and accelerations. A vehicle reference speed is formed from the wheel speeds of two diagonally opposite wheels. With this reference speed and the individual wheel speeds it is possible to calculate the brake slip for each wheel. If a wheel has a tendency to lock, this is determined from the wheel-acceleration and slip signals.



