
3.2起重机械
起重机械按其功能和构造特点,可分为四类:第一类是轻小型起重设备(包括:千斤顶、葫芦、绞盘机等),其特点重量轻,构造紧凑,动作简单,作业范围投影以点、线为主;第二类是升降机(包括:电梯、垂直升降机),其特点是重物或取物装置只能沿导轨升降;第三类是起重机(包括桥式类型起重机和旋转类型起重机),其特点是可以使挂在起重吊钩或其他取物装置上的重物在空间实现垂直升降和水平运移。第四类是木材装载机和叉车,在林上被广泛的用于木材的搬运和归楞等。
3.2.1轻小型起重设备
1、葫芦
电动葫芦是一种轻小型起重设备,具有体积小,自重轻,操作简单,使用方便等特点,用于工矿企业,仓储码头等场所。起重量一般为 0.1~80t,起升高度为3~30m。它由电动机、传动机构和卷筒或链轮组成,分为钢丝绳电动葫芦和环链电动葫芦两种。钢丝绳电动葫芦可以沿工字型轨道行走,与梁式、桥式起重机配套使用。

图3-7 葫芦
2、绞盘机
绞盘机是由人力绞车以及起重机械中驱动钢丝绳的卷筒机构演变发展而来的。绞车往往只有一个卷筒,而绞盘机有单卷筒、双卷筒和多卷筒等,它由电动机或内燃机通过传动系统进而驱动卷筒,和其他辅助装置(滑车、架杆等)配套使用。双筒绞盘机与滑车、金属架杆组成的移动型架杆机,在贮木场用来归楞和装车,是一种简易的起重设备。绞盘机作为一个独立的机械,能适应林区的生产条件,操作简单,维修容易,所以在林区被广泛地用来作为起重输送设备的动力。国内各林业机械厂都生产了各种类型的林用绞盘机。

绞盘机
3、起重机
起重机主要包括起升机构、运行机构、变幅机构、回转机构和金属结构等。起升机构是起重机的基本工作机构,大多是由吊挂系统和绞车组成,也有通过液压系统升降重物的。运行机构用以纵向水平运移重物或调整起重机的工作位置,一般是由电动机、减速器、制动器和车轮组成。变幅机构分小车变幅和动臂变幅两种。旋转机构用以使臂架回转,是由驱动装置和回转支承装置组成。金属结构是起重机的骨架,主要承载件如桥架、臂架和门架可为箱形结构或桁架结构,也可为腹板结构,有的可用型钢作为支承梁。
4、木材装载机和叉车
木材装载机是指在汽车、拖拉机或特种轮胎底盘上,安装有能够起升和转移木材以进行装卸和归楞等作业的机械设备。它们各自属于起重机械的一种类型,但是有下列共同特点:
1) 有机动车辆的底盘,运行灵活,服务场地范围大;
2) 没有钢丝绳等挠性牵引件,而完成起升、变幅和旋转等动作的机构都采用液压传动;
3)工人只要操作机械本身,不用直接接触产品(如原木、板材等);从这一点来说,木材装载机的应用已经使这一部分生产的机械化进入了第二发展阶段,也即从单工序机械化阶段进入了全盘机械化阶段,在这个阶段所使用的机械能连续完成二个以上的工序,如林区的伐木-集材联合机、打枝-造材联合机等,工人只要操作机械,其双手不用触及木材,全部作业由各种机构完成。
现在出现的木材装载机有三种基本类型:一种是随车液压起重臂类型的,它属于运行式旋转起重机,能连续完成装车、运材和卸车作业;随车液压起重臂在国外林业生产中使用很广泛,瑞典的HIAB公司和Jonsereds公司生产的木材装载机都是随车液压起重臂类型的,其液压起重臂和工作装置已经系列化,在林区使用中显示了独有的优越性。一种是工程装载机类型的,能在贮木场进行原条和原木等物品的装卸和归楞作业,在木材加工厂进行板材和货箱的装卸作业,在基建工地中推土、平地、铲挖和装卸散粒物料时,只要换上不同的工作装置就能进行不同的作业(图3-23所示)。

颚爪式木材装载机
还有一种是叉车类型的木材装载机,有铲取木材的液压叉,适合于木材加工厂和贮木场制材车间作板材、方材和原木等的装、卸、短途运送和归楞作业等;它可以和仓库、车站的叉车相通用。叉车分正面叉车和侧式叉车两种。叉车主要有两个机构:一是起升机构,能将物品作垂直升降;另一是运行机构,能携带着物品在地面上行驶。它和工程装载机类型的木材装载机一样,能在起重工作中带载运行。近年来,世界各国叉车的生产量增长很快,随着集装箱运输的发展,叉车的应用范围也相应扩大,品种在不断增多。林业生产中主要应用侧式叉车,因为侧式叉车可以用搬运长料,如木材、钢材、集装箱等(图3-24所示)。

侧式叉车
3.2.2林业起重机械的基本参数
林业起重机械的基本参数包括:起重量、起升高度、跨度或幅度、工作速度、机器的重量、生产率及工作级别等。这些参数是表征林业起重机械特性的主要指标,也是设计的技术依据。
(1)起重量
起重量是指起重机允许起吊的物品的最大重量以及能从起重机上取下的取物装置(不包括吊钩装置)重量之和。对于配置抓斗、电磁吸盘的起重机,起重量包括抓斗、电磁吸盘本身的重量。起重量的单位是吨。起重量系列已有国家最新标准,即GB/T 783-2013 起重机械-基本型的最大起重量系列,替代了原GB783—1987起重机械起重量系列,新设计的起重机械的起重量参数应在国家标准的系列范围内选取。起重量较大的起重机常有两套起升机构,大起重量的称为主钩,小起重量的称为副钩,主、副钩的起重量通常用斜线分开来,例如,20t/5t即表示主钩的最大起重量为20t,副钩的最大起重量为5t。
(2)起升高度
起重机的起升高度是指起重机工作场地的地面或起重机运行轨道的顶面至吊钩中心的最高位置之间的距离。起升高度决定于装卸物品的品种和不同的抓具。对于经常装卸竹木和配置抓斗的起重机,起升高度就要求大一些,主要用于装卸钢材或比重较大的物品的起重机,起升高度可以小一些。对于某些装卸船只上和港口上的起重机,吊钩或抓斗需要下到工场地面或整机运行轨道顶面以下进入船舱装卸物品,此时起升高度应包括地面或轨面以下的部分。电动桥式起重机起升高度已制订有国家标准即GB/T790-1995。
(3)跨度或幅度
跨度是指桥式类型起重机两条运行轨道中心线之间的距离;而幅度是指旋转类型起重机吊钩垂直中心线至旋转中心线之间的水平距离。单位为米。它们都是说明起重机工作范围的参数。而装卸桥的悬臂长在跨度之外,一般是根据用户要求、物品长短和联运车辆种类、悬臂下面铺设线路条数及考虑悬臂和跨度的合理比例而定。
(4)工作速度
起重机的工作速度包括起升、变幅、旋转和运行四个工作速度。起升速度是指被起升物品在单位时间内垂直位移的距离,以m/min表示;变幅速度是指被吊物品自最大幅度到最小幅度之间的平均速度;对桥式类型起重机来说,变幅速度是指在单位时间内起重小车的运行距离,以m/min表示;旋转速度是指旋转类型起重机在单位时间内旋转的转数,以r/min表示;运行速度是指起重机在单位时间内运行距离,以m/min或km/h表示;
(5)机器的重量
机器的重量是不带附属工具、燃料、润滑材料、水和人员以及无载时的起重机本身重量。机器的重量是设计工作的重要经济技术指标之—。
(6)工作级别
工作级别是表明起重机繁忙程度和工作条件的参数,是表征起重机械工作特性的重要标志。起重机械的工作类型的有关问题详细叙述于后。
3.2.3林业起重机械的特点
林业起重机械主要用于木材成品、半成品的转运,在林业生产中为减轻劳动强度、提高生产效率,实现自动化生产起到了重要的作用。林业起重机械除了具备起重机械的一般特征之外,由于林业生产的自身特点,其技术参数和结构组成较其它起重机械也有一定的差异。林业生产一般都有下列几方面的特点:
(1)由于树种、材种繁多,体积轻重不一,木材庞大笨重,造成生产品种的多样性和复杂性;
(2)林业生产周期较长,造成了作业地区的临时性和分散性,与此同时而又必须照顾林业生产的连续性;
(3)因为多数情况下为露天作业,受复杂气候和地形的严重影响,造成生产条件的恶劣性;
(4)生产作业地点的偏僻性和偏远性等。
上述的这些特点给林业生产实现机械化带来了较大困难,若和其他生产部门相比较,林业生产中的机械化程度要低得多,落后得多,林业工人的劳动条件要艰苦得多,繁重得多;其中特别是木材和林产品的装卸和在场内、厂内、车间内的短距离运输工作,既是不可缺少的,又是艰苦而繁重的工作;为了冲破困难,把林业工人从笨重的体力劳动中解放出来,林业起重机械在林业生产机械化中起了先锋作用。
林业起重机械与工程用的一般起重机械的结构大体相同,只是由于林业起重机械的主要作业对象为木材,其长度直径比相对较大,在起重过程中不利于装夹。因此在设计林业起重机械的取物装置时应重点考虑以上特点。图3-8是一种装卸桥结构的林业起重机,用于木材的搬运和装车。

图3-8 林业起重机装卸桥
3.2.4起升机构
起升机构是使物品产生升降运动的机构,是起升物品的机构,起重机也是由此得名的。因此,起升机构是起重机械各机构中最主要和最基本的机构。当起重量大于15t时,通常除了主起升机构之外,还设置副起升机构,在构造上两者是相同的,起升机构如图3-9所示。
图3-9 起升机构
通常一般的起升机构结构简图如图3-10所示,它是由电动机、联轴器、制动器、减速器、卷筒、钢丝绳、滑轮组、限位器等组成的。它的工作原理是:电动机经过减速器后带动卷筒转动,使钢丝绳卷进卷筒或由卷筒上放出,从而使吊钩产生升降运动。卷筒正、反向转动是通过改变电动机的转向来实现的;而机构的停止或使物品保持在悬吊状态是依靠制动器抱住制动轮来实现的。制动器通常是装在高速轴上,即电动机轴。这样所需要的制动力矩小,因而制动器的尺寸小,重量轻。滑轮和钢丝绳等组成了省力滑轮组。
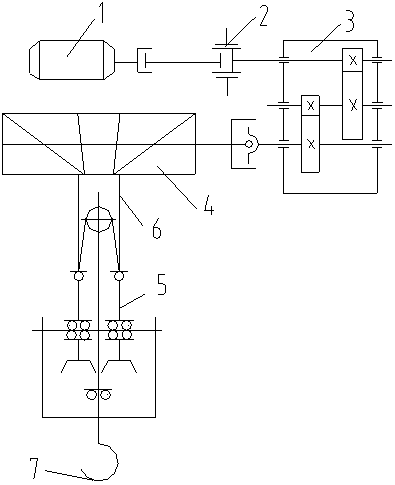
图3-10 起升机构简图
1.电动机 2.联轴器 3.减速器 4.卷筒 5.滑轮组 6.钢丝绳 7.吊钩
3.2.5运行机构
在起重机械中,运行机构主要是用来水平移动载荷,以及用来调整起重机或者小车的工作位置。它是通用起重机械的四大机构之一。运行机构一般分为有轨运行机构和无轨运行机构两大类。
按照运行机构布置位置的不同,有轨运行机构可以分为两种:一种是运行机构直接安装在运行部分(小车或起重机)上的称为自身驱动的运行机构;另一种是运行机构和运行部分互相分开,用牵引件联系起来的称为外部驱动的运行机构。
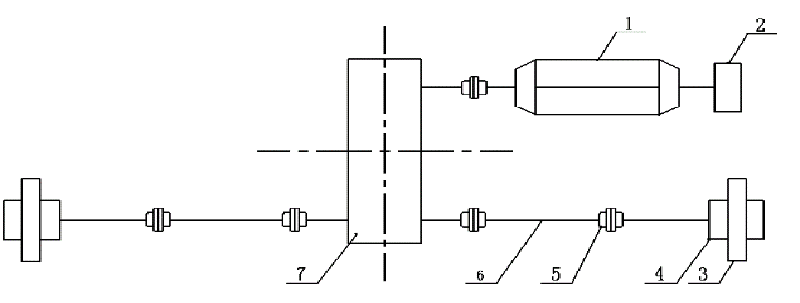
图3-14 集中驱动的运行机构
1、电动机 2、制动器 3、减速器 4、传动轴 5、联轴器 6、角轴承架 7、车轮
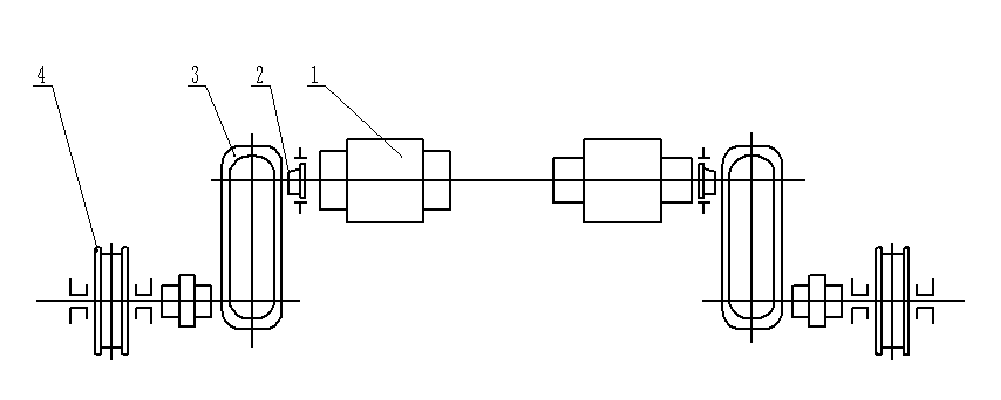
图3-15 分别驱动的运行机构
1.电动机 2.制动器 3.减速器 4.车轮装置
运行机构具有两个方面的作用:一是用来驱动车轮转动,使起重机沿着轨道在水平方向运行,这个任务是由运行机构的驱动装置来完成的,它主要由电动机、制动器、减速器和车轮等组成;二是起支承整台起重机的作用,将起重机上所承受的外载荷及使起重机的自重载荷传递给轨道,该任务是由运行机构的支承装置来实现,它包括横梁、均衡梁、销轴和车轮组件等组成。两个方面的作用最后都是通过车轮来实现,因此,车轮是起运行和支承两方面的作用。
起重机的运行机构大都是采用交流电为动力的,运行机构的电动机是通过联轴器、传动轴和减速器来驱动车轮,使起重机沿轨道运行。起重机的运行方向是通过改变电动机转动方向来达到的;而起重机的停止是靠切断电源、电动机不转动、制动器抱住制动轮,使起重机停止运行。
在起重机中具有使整台起重机沿着轨道运行的机构,通常称为大车运行机构;还有使起重小车沿着辅设在主梁上的轨道运行的机构,通常称为小车运行机构。
3.2.6旋转机构
旋转机构的作用是使被起升在空间的物品绕起重机的垂直轴线作圆弧运动,以达到在水平面内运移物品的目的。它与其他机构(起升、运行和变幅)相配合,可以把物品运移到起重机工作范围内的任意一点去。
旋转机构是由支承旋转装置(支持和对中旋转部分)和促使旋转部分转动的驱动装置两大部分组成的。
根据采用支承旋转装置的构造型式,旋转机构可以分成定柱式、转柱式和转盘式三大类。起重机臂架装在转盘上,转盘中装有动力驱动设备,各种工作机构、司机室和对重等,连同机棚一起组成起重机的旋转部分。旋转部分通过支承旋转装置与非旋转部分相连。支承旋转装置由装在非旋转部分上的中心轴枢和支承滚轮组成的。转盘就是通过支承滚轮支承在圆形轨道上的。旋转运动是由装设在转盘上的旋转机构驱动与固定大齿轮相啮合的小齿轮,使起重机绕中心轴枢旋转,这种起重机称转盘式起重机。
转盘式旋转机构主要应用于汽车起重机、履带起重机、铁路起重机和门座起重机等。
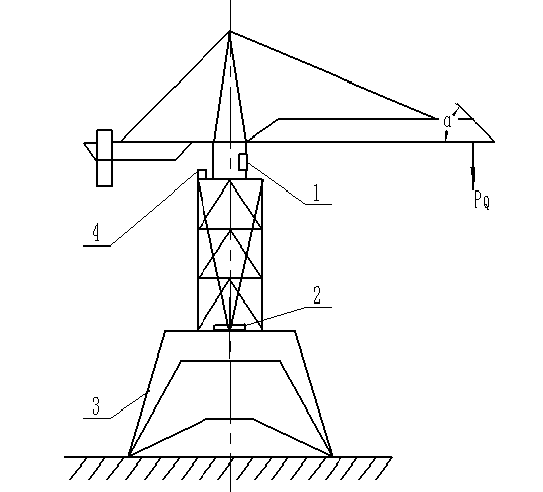
图3-12 旋转机构
1.旋转部分 2.非旋转部分3.支承旋转装置4.驱动装置
旋转机构的制动器通常采用常闭式的。也有用可操纵的常开式的,由脚踏和液压操纵,因此就可以按需要控制制动时间和行程,使制动平稳和准确。
臂架型旋转起重机要求低速和正、反向回转。当采用电力驱动和液压驱动时,可直接实现正、反向回转;当采用内燃机集中驱动时,则需要采用换向装置。起重机械卧式电动机与圆柱、圆锥齿轮传动优点是采用标准减速器,传动效率较高。
立式电动机与立式圆柱齿轮减速器传动优点是平面尺寸紧凑,传动效率高,在门座起重机中运用很普遍。立式电动机与行星齿轮减速器传动这种传动形式常采用立式行星齿轮减速器、摆线针轮减速器、少齿差减速器或谐波传动减速器等。起重机械其传动比大,结构紧凑,传动效率高。在起重机旋转机构中广泛应用。
起重机械绳索牵引的传动方式这种传动方式由卷扬机、牵引绳和特种转盘3个部分组成。这种传动方式优点是结构简单,制造和装拆都较方便。缺点是回转角受到限制。适用于不要求连续运转的起重机,例如桅杆式起重机。
3.2.7变幅机构
在悬臂起重机和动臂起重机中,从取物装置中心线到起重机旋转中心线或臂架铰轴之间的水平距离称为起重机的幅度。幅度通常都需要改变,以满足工作要求。因而,起重机上必须装有用来改变幅度的专用机构,这种机构称为起重机的变幅机构(图3-13)。

图3-13 起重机的变幅机构
变幅机构的主要作用是:(1)扩大起重机的工作范围;(2)由载荷引起的倾覆力矩近似为常数的情况下,调整起重机的有效起重量的大小。
1、变幅机构的基本类型
根据变幅机构的变幅方法,变幅机构可以分为两种基本类型:载重小车变幅和动臂变幅两种(图3-14)。
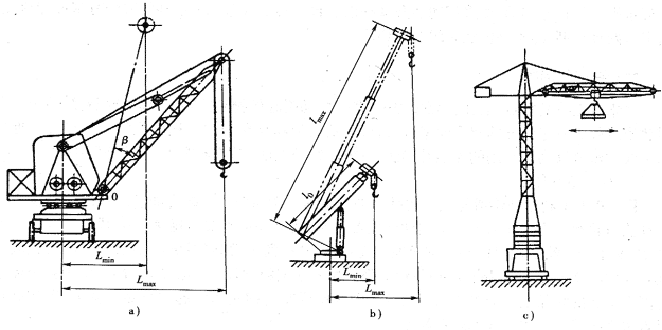
图3-14 起重机变幅机构的基本类型
a、b-动臂变幅 c、载重小车变幅
①载重小车变幅机构
在载重小车变幅机构中,幅度的改变是依靠载重小车沿着水平臂架弦杆上运行来实现的。这时,变幅机构一般由外伸臂架、载重小车和驱动装置三个基本部分组成的。这类变幅机构的主要优点是: 在变幅过程中臂架不需要在垂直平面内作摆动运动;而载重小车只作水平移动,因此,驱动功率最小;变幅速度不变,物品摇摆现象减小;能够有效地利用工作空间。这种变幅机构主要用于定柱和转柱式起重机、各种壁装的悬臂起重机和塔式起重机中。载重小车变幅机构和外部驱动运行机构完全相同。
②动臂变幅机构
动臂变幅机构中,幅度的改变是依靠动臂在垂直平面内绕其铰轴摆动来实现的。这时,变幅机构由可以绕其铰轴摆动的动臂以及驱动动臂摆动的驱动装置两个基本部分组成的。动臂变幅机构的主要优点是:动臂受力情况好,可以减轻自重;起重机的机动性较好。主要缺点是:驱动功率显著增加;难于获得恒定的变幅速度,物品的摆动现象增加;难于获得最小的幅度。

