航线规划方法
上一节
下一节
3.3 航线规划方法
新建航摄飞行计划
使用鼠标左键规划区域,Ctrl+Z可撤销最后一个规划区域,设置完成后在规划区域内鼠标右键点击“完成所有区域”,结束规划。

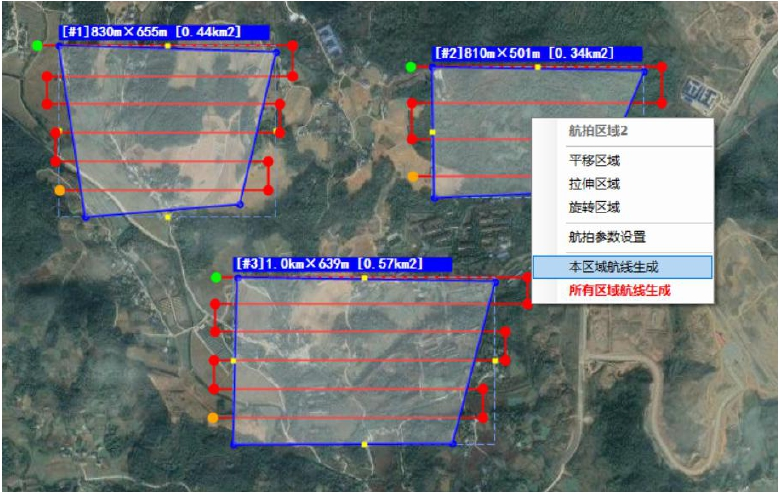
设计多个规划区域
可分别对多个规划区域进行调整与参数设置。

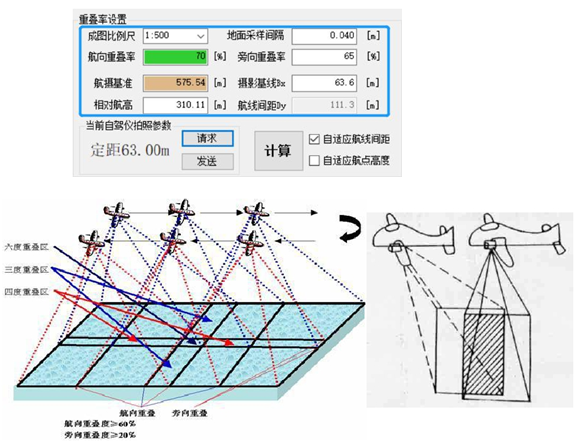
航拍参数设置
①相机型号参数
②设置地面采样间隔(0.8倍目标值)
③重叠率设置
④自适应航线间距
⑤航线方向

相机数据:根据使用相机的不同,选择相应相机型号
无人机标准正摄相机参数:(可查阅对应相机检校报告)


重叠率的设置
分辨率按0.8倍目标分辨率设置
建议重叠率:
1:500:航向不低于70%,旁向不低于65%
1:1000:航向不低于65%,旁向不低于60%
1:2000:航向不低于60%,旁向不低于55%
盘旋半径:CW10默认120。
航线方向:包括航线的进入点,以及进入方向。

拖动航线起始点可对航线长度进行调整以适应测区
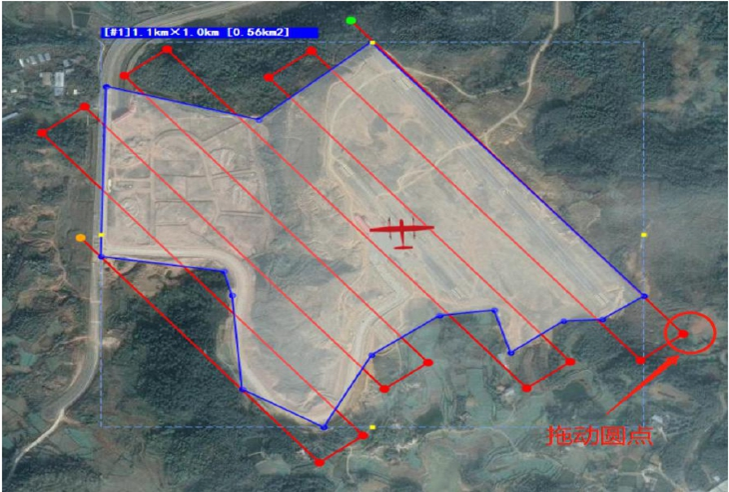
本区域航线生成:鼠标所在规划区域生成一条封闭的航线
所有区域航线生成:已经进行参数设置的所有区域生成一条封闭的航线
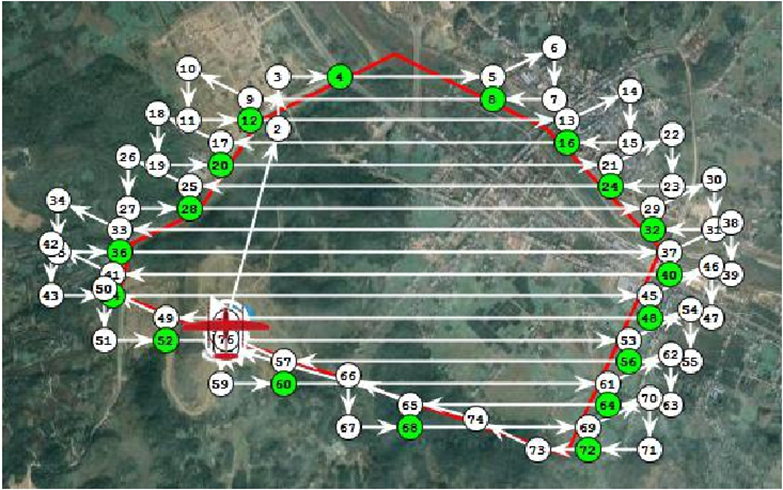
生成航线后:对降落前调整点进行高度调整,并对4个特殊航路点进行位置调整。

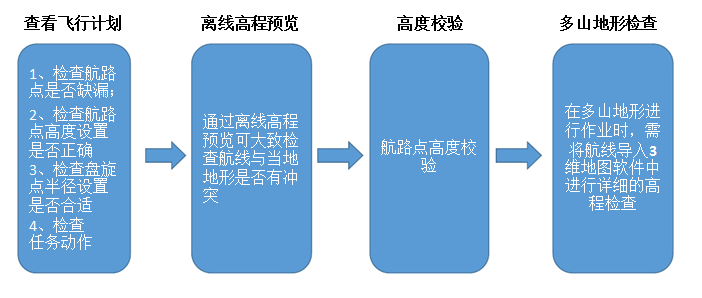
航线的检查:
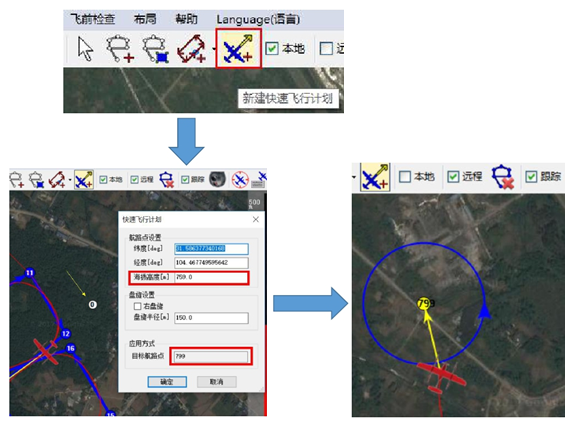
新建快速飞行计划
快速飞行计划作用:
在紧急情况下需要无人机立即在指定位置进行盘旋。