
项目二、曲柄滑块机构的装配与运动仿真
曲柄滑块机构是常见的运动机构之一,本任务将通过完成曲柄滑块机构的零件建模、组装、机构运动仿真、参数分析等步骤,重点介绍Creo软件组件的设计思路和方法技巧。
图3-2-1所示为曲柄滑块机构的装配图。
图3-2-1 曲柄滑块机构
[知识目标]
知道机构运动仿真的概念及作用。
[技能目标]
会正确定义零件之间的运动连接关系;能准确定义机构仿真参数,实现运动仿真;能分析仿真中的典型参数;能输出仿真动画。
[任务导入]
在实际制造前利用零件的三维数字模型进行机构运动仿真已成为现代CAD工程中的一个重要方向及课题。机构运动仿真可实现机械工程中对较复杂的运动机构或者要求运动精确的机构等进行运动分析。
任务1、曲柄滑块机构零件建模
1.1 任务目标
能正确完成曲柄滑块机构的组成零件建模。
1.2 任务内容
曲柄滑块机构组件共由五个零件组成,本任务要求正确建立每个零件的三维数字模型并予以存盘。
1.3 必备知识
本任务中零件的建模主要用到拉伸、旋转等特征,操作较为基础。各特征的注意事项可参照前文所述。
1.4 任务实施
(一)选择mmns_part_solid模板,创建底座零件,命名为“A”。
1.利用拉伸特征绘制如图3-2-2所示草绘,并拉伸15mm,如图3-2-3所示。
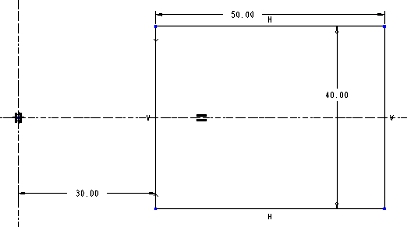
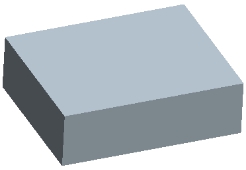
图3-2-2 拉伸草绘 图3-2-3 拉伸特征
2.在拉伸特征上切除一条宽度为10mm,深度也为10mm的槽,如图3-2-4所示。
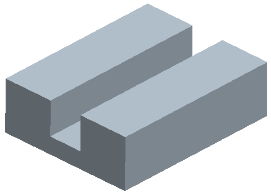
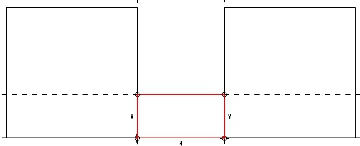
图3-2-4 拉伸切除 图3-2-5 拉伸草绘
3.绘制如图3-2-5所示草绘,拉伸35mm,形成特征如图3-2-6所示。
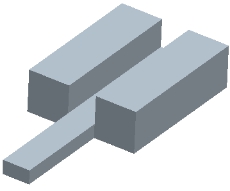
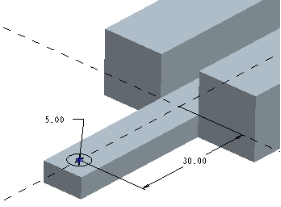
图3-2-6 拉伸特征 图3-2-7 拉伸草绘
4.绘制如图3-2-7所示草绘并向上拉伸6mm,如图3-2-8所示。
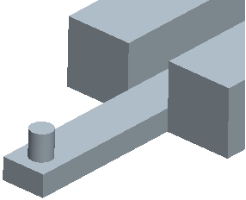
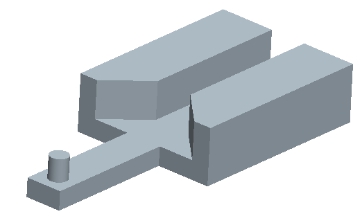
图3-2-8 拉伸特征 图3-2-9 倒角特征
5.对指定边线添加C10的倒角,如图3-2-9,保存零件。
(二)选择mmns_part_solid模板,创建圆盘零件,命名为“B”。
1.选择Front基准面,绘制如图3-2-10所示草绘,拉伸5mm,如图3-2-11所示。
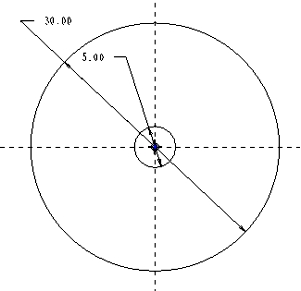
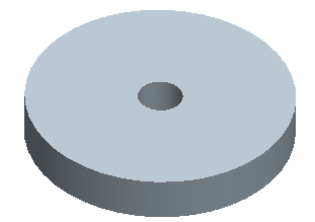
图3-2-10 拉伸草绘 图3-2-11 拉伸特征
2.在圆盘上表面绘制如图3-2-12所示草绘,拉伸8mm,如图3-2-13所示,保存零件。
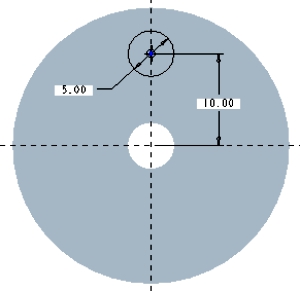
图3-2-12 拉伸草绘 图3-2-13 拉伸特征
(三)选择mmns_part_solid模板,创建连杆零件,命名为“C”。
1.选择Front基准面,绘制如图3-2-14所示草绘,两侧对称拉伸5mm,如图3-2-15所示。
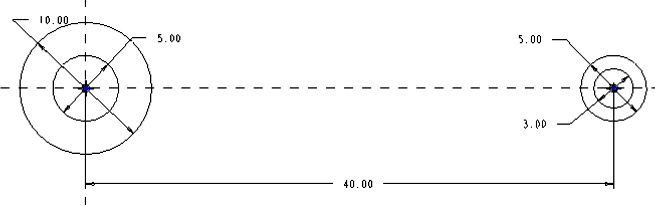
图3-2-14 拉伸草绘
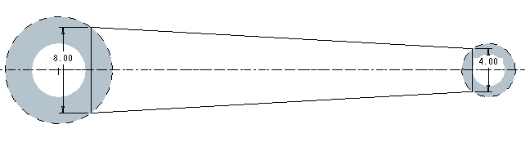 图3-2-15 拉伸特征 图3-2-16 拉伸草绘
图3-2-15 拉伸特征 图3-2-16 拉伸草绘
2.选择Front基准面,绘制如图3-2-16所示草绘,两侧对称拉伸3mm,如图3-2-17所示,保存零件。
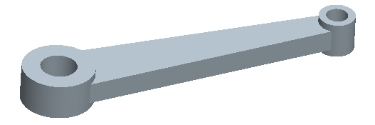
图3-2-17 连杆零件
(四)选择mmns_part_solid模板,创建滑块零件,命名为“D”。
1.选择Front基准面,绘制如图3-2-18所示草绘,拉伸10mm,如图3-2-19所示。
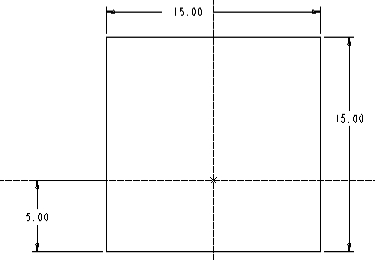
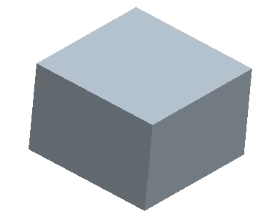
图3-2-18 拉伸草绘 图3-2-19 拉伸特征
2.在拉伸特征的侧面绘制如图3-2-20所示草绘,拉伸贯穿切除,如图3-2-21所示。
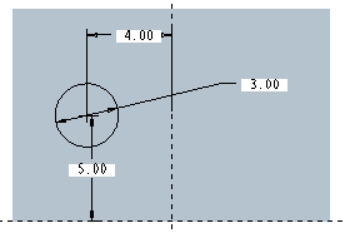
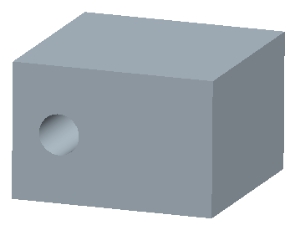 图3-2-20 拉伸草绘 图3-2-21 拉伸切除特征
图3-2-20 拉伸草绘 图3-2-21 拉伸切除特征
3.在拉伸特征的上表面,绘制如图3-2-22所示草绘,拉伸贯穿切除,如图3-2-23所示,保存零件。
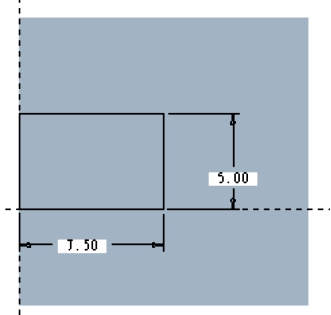
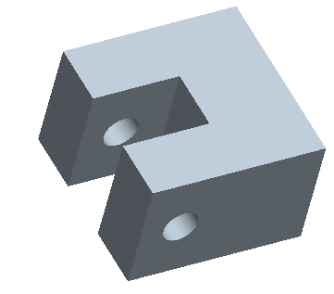 图3-2-22 拉伸草绘 图3-2-23 拉伸切除特征
图3-2-22 拉伸草绘 图3-2-23 拉伸切除特征
(五)选择mmns_part_solid模板,创建滑块零件,命名为“D”。
1.利用拉伸特征创建![]() 3x10mm的圆柱。
3x10mm的圆柱。
2.对该圆柱的两端边线添加倒角C0.5,如图3-2-24,保存零件。
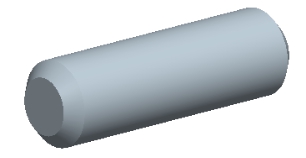
图3-2-24 销钉零件
任务二、构建装配曲柄滑块机构运动模型
2.1 任务目标
能正确完成曲柄滑块机构运动模型的组装。
2.2 任务内容
按照零件间的运动关系,正确定义运动连接,完成运动模型的组装。
2.3 必备知识
用户可以在放置菜单中的【用户定义】集选择定义运动约束,具体如下。而本任务中用到了其中“销钉”和“平面”两类运动约束关系。
刚性:自由度为0,刚性连接成的零件构成单一主体,一般定义机架时需要此连接。
销钉:为1个旋转自由度,允许沿指定轴旋转。
滑动杆:为一个平移自由度,允许沿轴平移。
圆柱:为1个旋转自由度和1个平移自由度,允许沿指定轴平移并且相对于该轴旋转。
平面:为1个旋转自由度和2个平移自由度,允许通过平面接头连接的主体在一个平面内相对运动,相对垂直与该平面的轴旋转。
球:有3个旋转自由度,但是没有平移自由度。
焊接:自由度为0,将两个零件粘接在一起,需定义坐标系对齐。
轴承:3个旋转自由度和1个平移自由度,是球接头和滑动杆接头的组合,允许接头在连接点沿任意方向旋转,沿指定轴平移。
常规:创建有两个约束的用户定义集。
6DOF:允许沿三根轴平移同时绕其旋转。
槽:包含1个点对齐约束,允许沿一条非直线轨迹旋转。
2.4 任务实施
(一)选择【文件】—【新建】,在弹出的新建对话框中选中【装配】类型,子类型选择【设计】,修改组件名称后去除【使用缺省模板】前的勾,在出现的模板选择选项卡中选择mmns_asm_desing模板,单击【确定】进入组件环境。
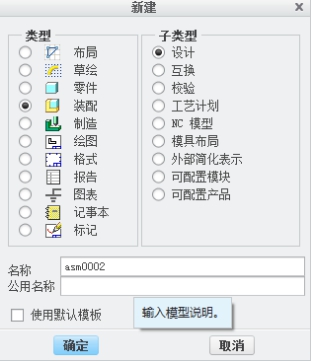
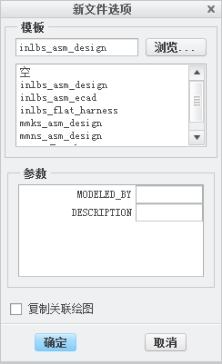
图3-2-25 新建对话框 图3-2-26 模板的选择
关键点:后缀名为.asm的文件为Creo的组件文件。 |
(二)组件环境的操作界面如图3-2-27所示。
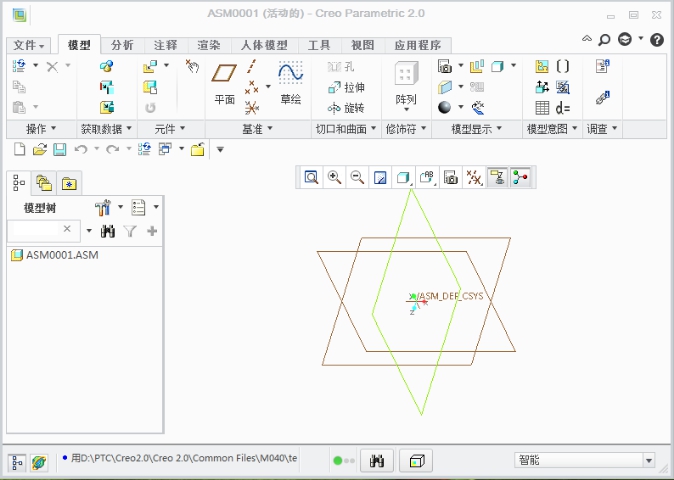
图3-2-27 组件环境操作界面
(三)点击![]() (组装)按钮,在弹出的【打开】对话框中选则要加入组装的零件,此处选择“A.prt”,打开,在出现的【元件放置】操控板上的【约束集】列表中选择“默认”,点击
(组装)按钮,在弹出的【打开】对话框中选则要加入组装的零件,此处选择“A.prt”,打开,在出现的【元件放置】操控板上的【约束集】列表中选择“默认”,点击![]() ,确定零件位置,完成第一个底座零件的装配。
,确定零件位置,完成第一个底座零件的装配。
![]()
图3-2-28 元件放置操控面板
(四)点击![]() (组装)按钮,在弹出的【打开】对话框中选则“B.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择圆盘的“A_3”轴与底座的“A_2”轴重合,再选择圆盘的下表面与底座槽的上表面重合,点
(组装)按钮,在弹出的【打开】对话框中选则“B.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择圆盘的“A_3”轴与底座的“A_2”轴重合,再选择圆盘的下表面与底座槽的上表面重合,点![]() 完成圆盘零件的装配,如图3-2-30所示。
完成圆盘零件的装配,如图3-2-30所示。
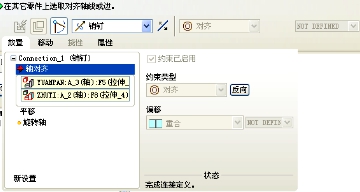
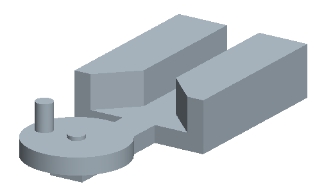
图3-2-29 销钉连接放置操控面板设置 图3-2-30 圆盘的组装
表3-2-1 圆盘与底座的销钉连接
约束类型 | 元 件 | 组 件 | 偏 移 |
轴对齐 | A_3轴 | A_2轴 | 重合 |
平移 | 圆盘下表面 | 底座槽上表面 | 重合 |
关键点:如果元件之间不需要产生相对运动的关系,【用户定义】处可以不选择,如果需要在元件之间产生指定的机构运动,则需要按照实际情况在【用户定义】处选择正确的连接方式,如“销钉”即在两个相互连接的对象之间产生一个旋转自由度,两个对象允许相对绕轴产生旋转运动。此处圆盘需要绕底座上的轴作旋转运动,所以用“销钉”来连接A、B两个零件。一个销钉连接的定义需要一组旋转轴的对齐和一组面之间的平移对齐。 |
(五)点击![]() (组装)按钮,在弹出的【打开】对话框中选则“C.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择连杆大端的“A_5”轴与圆盘的“A_6”轴重合,再选择连杆大端的下表面与圆盘的上表面 重合,如图3-2-31所示。但此时连杆的小段伸进了底座中,显然不合理,此时我们可以打开放置操纵面板上的【移动】选项卡,选择“旋转”的运动方式,选择A_6轴作为运动参照,左键单击连杆小端后往外旋出,单击左键确认位置,如图3-2-32、3-2-33所示,点
(组装)按钮,在弹出的【打开】对话框中选则“C.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择连杆大端的“A_5”轴与圆盘的“A_6”轴重合,再选择连杆大端的下表面与圆盘的上表面 重合,如图3-2-31所示。但此时连杆的小段伸进了底座中,显然不合理,此时我们可以打开放置操纵面板上的【移动】选项卡,选择“旋转”的运动方式,选择A_6轴作为运动参照,左键单击连杆小端后往外旋出,单击左键确认位置,如图3-2-32、3-2-33所示,点![]() 完成圆盘零件的装配。
完成圆盘零件的装配。
表3-2-2 连杆与圆盘的销钉连接
约束类型 | 元 件 | 组 件 | 偏 移 |
轴对齐 | A_5轴 | A_6轴 | 重合 |
平移 | 连杆大端下表面 | 圆盘上表面 | 重合 |
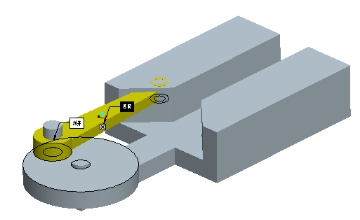
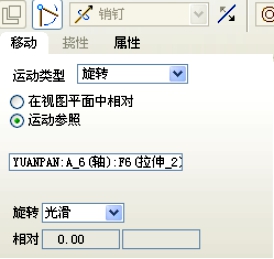
图3-2-31 连杆装配 图3-2-32 移动操控菜单
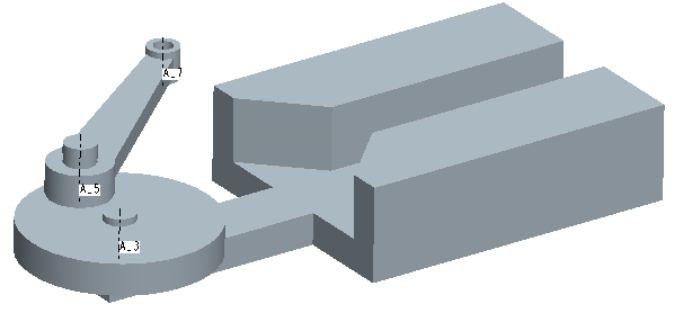
图3-2-33 移动调整连杆位置
关键点:【移动】面板可以对正在装配中的元件进行平移、旋转、定向等移动操作,当该菜单处于活动状态时,其他所有元件的防止操作将暂停。 |
(六)点击![]() (组装)按钮,在弹出的【打开】对话框中选则“D.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择滑块零件的“A_2”轴与连杆的“A_7”轴重合,再选择滑块槽的内表面与连杆小端的上表面重合,借着点击放置菜单中的“新设置”按钮,用户定义中选择新的约束条件类型为“平面”,选择滑块的侧面与底座槽的侧面重合,点
(组装)按钮,在弹出的【打开】对话框中选则“D.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择滑块零件的“A_2”轴与连杆的“A_7”轴重合,再选择滑块槽的内表面与连杆小端的上表面重合,借着点击放置菜单中的“新设置”按钮,用户定义中选择新的约束条件类型为“平面”,选择滑块的侧面与底座槽的侧面重合,点![]() 完成滑块的装配。
完成滑块的装配。
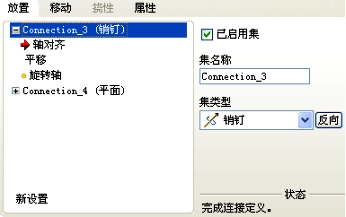
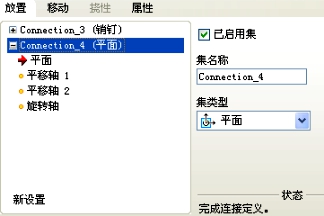
图3-2-34 销钉连接 图3-2-35 平面连接
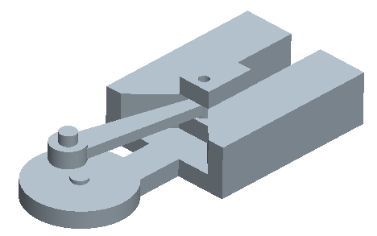
图3-2-36 滑块零件的组装
表3-2-3 滑块与连杆的销钉连接
约束类型 | 元 件 | 组 件 | 偏 移 |
轴对齐 | A_2轴 | A_7轴 | 重合 |
平移 | 滑块内侧上表面 | 连杆小端上表面 | 重合 |
表3-2-4 滑块与底座的平面连接
约束类型 | 元 件 | 组 件 | 偏 移 |
平面 | 滑块侧面 | 底座槽内侧面 | 重合 |
关键点:此处滑块相对于连杆小端作旋转运动,应当使用销钉进行组装,另该滑块同时相对于底座槽内侧面作来回运动,此运动过程中滑块侧面始终紧贴底座槽侧面,应当再使用一个平面连接来确立滑块与底座之间的运动关系。 平面:为1个旋转自由度和2个平移自由度,允许通过平面接头连接的主体在一个平面内相对运动,相对垂直与该平面的轴旋转。 |
(七)点击![]() (装配)按钮,在弹出的【打开】对话框中选则“E.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择销钉零件的“A_2”轴与滑块的“A_2”轴重合,再选择销钉的上表面与滑块的上表面重合,点
(装配)按钮,在弹出的【打开】对话框中选则“E.prt”,打开,在元件放置操控面板中的【用户定义】栏下选择“销钉”连接方式,然后打开面板上的【放置】菜单,选择销钉零件的“A_2”轴与滑块的“A_2”轴重合,再选择销钉的上表面与滑块的上表面重合,点![]() 完成销钉的装配。
完成销钉的装配。
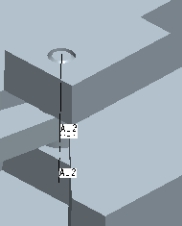
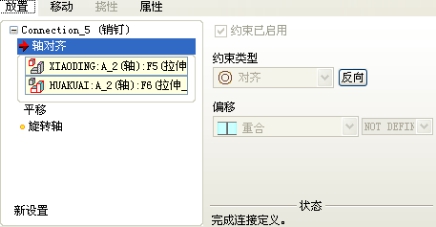
图3-2-37 销钉 图3-2-38 销钉连接设置
表3-2-5 销钉与滑块的销钉连接
约束类型 | 元 件 | 组 件 | 偏 移 |
轴对齐 | A_2轴 | A_2轴 | 重合 |
平移 | 销钉上表面 | 滑块上表面 | 重合 |
(八)保存装配体至工作目录。
任务三、曲柄滑块机构的运动仿真及分析
3.1 任务目标
能正确完成曲柄滑块机构的运动仿真与分析。
3.2 任务内容
完成曲柄滑块机构的运动仿真并输出动画;分析运动中关键参数与时间的关系。
3.3 必备知识
Creo包含的机构运动仿真模块能够对按照运动关系正确装配的组件进行模拟仿真、检测干涉、参数分析等操作,实现了计算机环境下的产品虚拟检测和分析,便于后期的优化和修改。
机构运动仿真的创建可以按照如下流程进行:
![]()
![]() 装配运动模型 设置运动环境 分析和获取结果
装配运动模型 设置运动环境 分析和获取结果
3.4 任务实施
(一)打开上一步中装配好的运动模型,点击【应用程序】—【机构】,进入机构运动仿真环境,其主要工具条如图3-2-41所示。

图3-2-41 机构仿真环境的主要工具
(二)单击![]() (伺服电动机),选择圆盘与底座零件装配时产生的销钉连接运动轴,单击【轮廓】选项卡,设置参数如图3-2-42、图3-2-43所示。
(伺服电动机),选择圆盘与底座零件装配时产生的销钉连接运动轴,单击【轮廓】选项卡,设置参数如图3-2-42、图3-2-43所示。
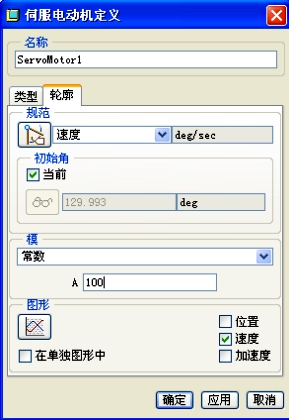
图3-2-42 伺服电动机的设置 图3-2-43 伺服电动机
(三)单击![]() (机构分析)按钮,修改参数如图3-2-44所示,单击【运行】,【确定】,即可看到曲柄滑块机构的仿真运动模拟。
(机构分析)按钮,修改参数如图3-2-44所示,单击【运行】,【确定】,即可看到曲柄滑块机构的仿真运动模拟。
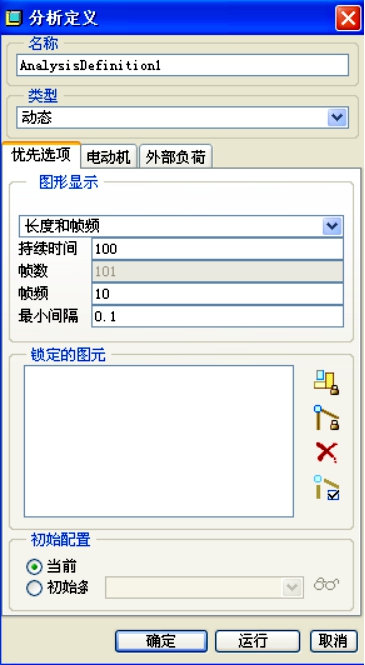
图3-2-44 分析定义工具栏
(四)单击![]() (回放),选择需要回放的分析结果集,如图3-2-45所示。单击
(回放),选择需要回放的分析结果集,如图3-2-45所示。单击![]() ,进入动画控制面板,单击【捕获】以输出动画。
,进入动画控制面板,单击【捕获】以输出动画。
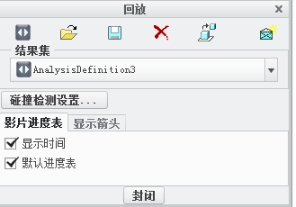

图3-2-45回放控制面板 图3-2-46 动画控制面板

图3-2-47 动画输出控制面板
(五)机构环境可以实时测量仿真运动过程中的参数变化,本处以测量滑块的滑动速度与时间之间的关系为例。单击![]() (测量),出现如图3-2-48所示测量控制面板。点击
(测量),出现如图3-2-48所示测量控制面板。点击![]() (新建)按钮新建一个物理量命名为speed,选择类型为速度,选择滑块上平面连接图标上的滑动运动轴,确定,如图3-2-49、图3-2-50所示。
(新建)按钮新建一个物理量命名为speed,选择类型为速度,选择滑块上平面连接图标上的滑动运动轴,确定,如图3-2-49、图3-2-50所示。
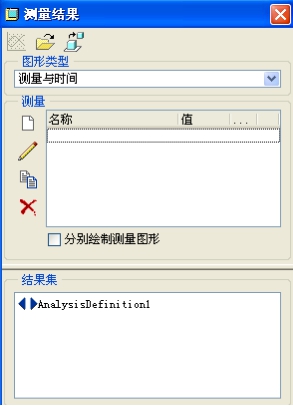
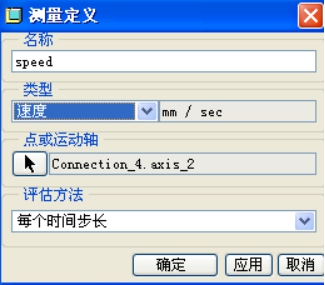
图3-2-48 测量控制面板 图3-2-49 测量定义面板
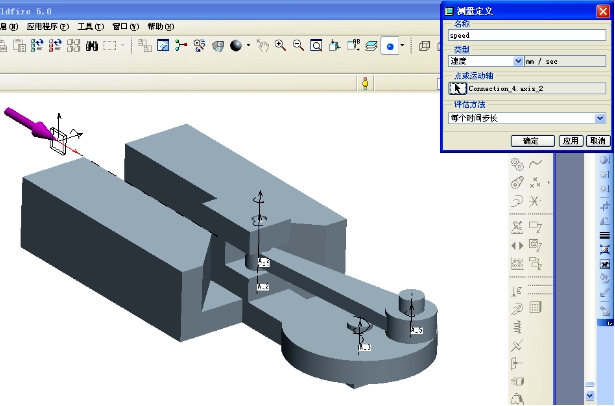
图3-2-50 选择平面连接运动轴
(六)回到测量控制面板后单击要与定义的速度关联的结果集,软件系统即计算出实时的速度大小,如图3-2-51所示。点击左上角![]() ,可以绘出速度与时间的关系图,在此图中可查出任意时间的速度值。如图3-2-52所示。
,可以绘出速度与时间的关系图,在此图中可查出任意时间的速度值。如图3-2-52所示。
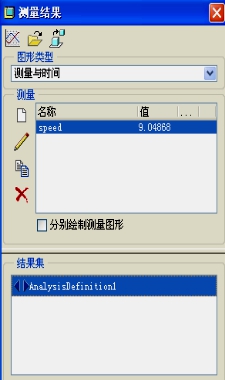
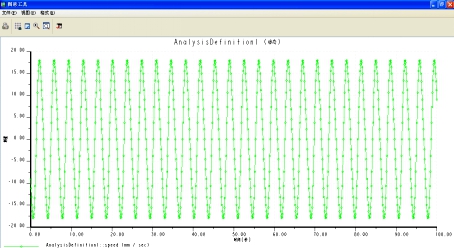
图3-2-51 实时速度显示 图3-2-52 速度与时间的关系图

