有关北斗的惊险故事
什么是导航
北斗服务
================================================================
http://www.beidou.gov.cn/yw/xwzx/202002/t20200215_20081.html
北斗卫星导航系统第41颗卫星(地球静止轨道卫星)、第49颗卫星(倾斜地球同步轨道卫星)、第50颗卫星(中圆轨道卫星)和第51颗卫星(中圆轨道卫星)已完成在轨测试、入网评估等工作,于近日正式入网工作。其中,第41和49颗卫星由中国空间技术研究院研制,分别于2018年11月1日和2019年11月5日在西昌卫星发射中心发射;第50和51颗卫星由中国科学院微小卫星创新研究院研制,于2019年11月23日在西昌卫星发射中心发射。
2019年9月23日5时10分,我国在西昌卫星发射中心用长征三号乙运载火箭(及配套远征一号上面级),以“一箭双星”方式成功发射第四十七、四十八颗北斗导航卫星。
2018年11月19日2时7分,我国在西昌卫星发射中心用长征三号乙运载火箭(及远征一号上面级),以“一箭双星”方式成功发射第四十二、四十三颗北斗导航卫星,这两颗卫星属于中圆地球轨道卫星,是我国北斗三号系统第十八、十九颗组网卫星。
2018年10月15日12时23分,我国在西昌卫星发射中心用长征三号乙运载火箭(及远征一号上面级),以“一箭双星”方式成功发射第三十九、四十颗北斗导航卫星。这两颗卫星属于中圆地球轨道卫星,是我国北斗三号系统第十五、十六颗组网卫星。

延伸阅读
https://www.blackdotgnss.com/2016/02/17/beidou-first-insights/
After implementing Galileo processing capabilities in my PPP software, the next step towards GNSS modernization was the inclusion of BeiDou satellites. The active constellation of BeiDou-2 satellites currently consists of 6 geostationary (GEO), 5 inclined geosynchronous orbit (IGSO) and 4 medium earth orbit (MEO) satellites. Until 2020, when 27 MEO satellites should be in orbit, BeiDou will be more of a regional system covering mainly Asia and Australia. While the implementation of Galileo was rather straightforward, including BeiDou turned out to be more of a challenge.
The first (minor) issue encountered originated in the RINEX files, where the signals L1I and C1I were being tracked. My initial implementation followed the RINEX 3.03 format definition which specifies that BeiDou signals would be labeled as either C2x (B1), C7x (B2) or C6x (B3). However, a footnote in the RINEX document did mention the following: “When reading a RINEX 3.02 file, both C1x and C2x coding should be accepted and treated as C2x in RINEX 3.03.”
Once this issue resolved, I was able to compute a PPP solution, albeit not a great one… I had to read a few papers on BeiDou before realizing that the phase center offsets (PCO) provided in the IGS ANTEX file are actually not the ones used by several analysis centers. The GFZ products that I am using in this study use phase center offsets estimated by ESA and published in an IGS Workshop poster (Dilssner et al. 2014). I thus had to create my own ANTEX file using the values provided in this publication. This poster refers to BeiDou satellites as IGSO-1 to IGSO-5 and MEO-3 to MEO-6. This labeling of satellites does not match any information in the ANTEX files but the correspondence with the PRN number could be made using the IGS MGEX webpage.
After using the proper PCO values, the PPP solution greatly improved, although the carrier-phase residuals were still larger than expected. The problem, this time, was an improper satellite attitude determination. As specified in the paper by Montenbruck et al. (2015), geostationary satellites use an orbit-normal mode with a fixed yaw-angle of zero degrees, as opposed to the yaw-steering mode used by GPS, GLONASS and Galileo. The BeiDou MEO satellites also use this orbit-normal mode when the angle between the Sun and the orbital plane (“beta”) is smaller than approximately 4 degrees (see the interesting work by Dai et al. (2015) for more details on the transition periods).
While the carrier-phase residuals now had a reasonable RMS value, the code residuals were still quite large, even at high elevation angles. This issue could be mitigated by applying the calibration values proposed by Wanninger and Beer (2015) to account for satellite-induced code pseudorange variations.
To test this initial implementation, I processed 24 hours of data from station CUT0, located at Curtin University in Australia, collected on 02 Jan 2016 following the PPP methodology in kinematic mode. I assigned the same weight to all GNSS, and obtained the following RMS errors for different GNSS configurations:
Solution
| Latitude(mm) | Longitude(mm) | Height(mm) |
| G | 10.7 | 7.5 | 20.4 |
| G+R | 8.2 | 7.1 | 18.1 |
| G+R+E | 7.9 | 6.4 | 17.7 |
| G+R+E+C | 7.0 | 5.1 | 115.5 |
Even though the results for the GPS-only solution were not great to start with (did I introduce a new bug?), a reduction in the RMS of each component can be observed with additional constellations. In the quad-constellation solution, up to 34 satellites were used simultaneously in the solution. I then selected a 45-min period with good satellite coverage (from 01:00 to 01:45 GPST) to analyze the convergence period of the different solutions:
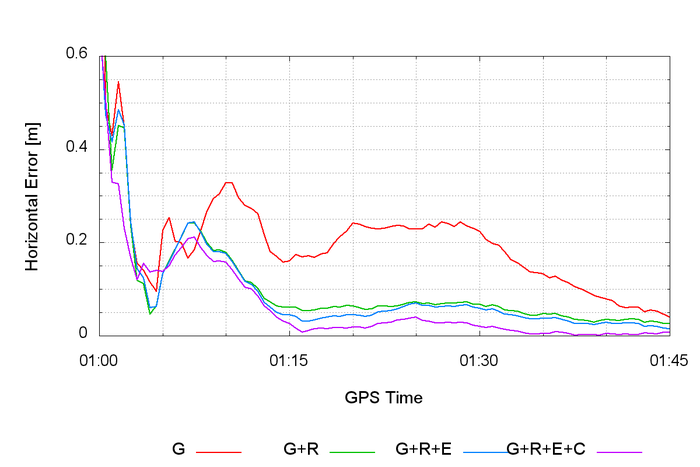
It is interesting to note that simply adding GLONASS to GPS already provides a significant reduction in convergence time, although tracking more than 30 satellites certainly brings additional benefits to the solution. When the full constellations of triple-frequency satellites will be available for all systems, combined with ambiguity resolution capabilities, PPP convergence will most likely be a thing of the past.
References
Dai X, Ge M, Lou Y, Shi C, Wickert J, Schuh H (2015) Estimating the yaw-attitude of BDS IGSO and MEO satellites. J Geod 89(10):1005-1018. doi:10.1007/s00190-015-0829-x
Dilssner F, Springer T, Schönemann E, Enderle W (2014) Estimation of satellite antenna phase center corrections for BeiDou. IGS Workshop, Pasadena, California, USA
Montenbruck O, Schmid R, Mercier F, Steigenberger P, Noll C, Fatkulin R, Kogure S, Ganeshan A S (2015) GNSS satellite geometry and attitude models. Advances in Space Research 56(6):1015-1029. doi:10.1016/j.asr.2015.06.019
Wanninger W, Beer S (2015) BeiDou satellite-induced code pseudorange variations: diagnosis and therapy. GPS Solut 19(4):639-648. doi: 10.1007/s10291-014-0423-3


