
-
1 任务布置
-
2 任务分析
-
3 任务实施
-
4 实操评价
任务描述
现公司新购一套工业机器人码垛工作站,你作为工程师,需要完成工业机器人系统安装、I/O配置、设置工业机器人计数器、周边设备编程等工作,并根据实际垛型需求,完成工业机器人搬运码垛程序手动和自动运行。运行完成后,备份机器人程序到外部USB存储设备中。
题目一:工业机器人操作规范(10分)
安全着装要求。
操作规范要求。
题目二:搬运码垛模块安装(20分)
依据机电设备安装规范,参考工作站布局示意图,选用合适的工具完成搬运码垛模块的安装。要求搬运码垛模块上的各工作点位均在工业机器人的工作范围内且模块不与其它模块发生干涉,不影响机器人执行其它模块的任务,工作站布局示意图如图2-1所示。

图2-1 工作站布局示意图
题目三:工业机器人转数计数器更新(15分)
1. 对齐同步标记
(1)切换工业机器人模式至手动模式档,将示教器中工业机器人操纵杆的速率调节为30%。
(2)手动操纵工业机器人进行单轴运动,使工业机器人6个关节轴依次运动回机械原点,对齐同步标记。
2. 更新转数计数器
完成工业机器人6 个关节轴的转数计数器更新操作,并向考评人员展示如图3-1所示的示教器中“转数计数器更新已成功完成”的界面。
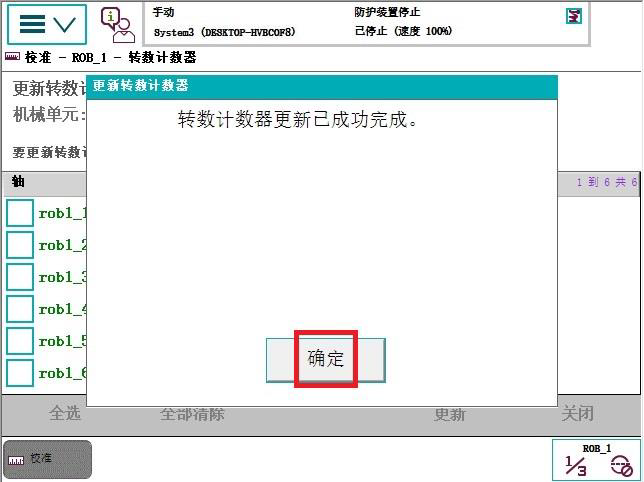
图3-1 转数计数器更新已成功完成界面示意图
题目四:工业机器人IO信号配置(15分)
IO信号配置
(1)在示教器中正确配置工业机器人DSQC652板卡,将地址设置为10 。
(2)完成码垛工作站中所需使用信号的配置,码垛工作站中所需用到的工业机器人信号具体见表4-1。
表4-1 多工位码垛工作站的工业机器人IO信号

IO信号调试
在完成工业机器人IO信号的配置后,进行信号配置准确性测试,验证信号ToTDigGrip和ToTDigQuickchange信号功能。
题目五:工业机器人操作与编程(40分)
周边设备编程
编写并下载触摸屏程序及PLC控制程序,实现在触摸屏上选择垛型(垛型1或
垛型2)后,PLC将工位信息传送至工业机器人,涉及的PLC端信号见表5-1。
注意:工作站通信硬件接线已经完成。

工业机器人操作与编程
(1)示教编程
通过示教器编写工业机器人程序并分别在手动和自动模式下调试运行,实训工业机器人可以根据FrPDigOption信号值选择对应垛型,依次执行夹爪工具拾取、码垛块的拾取与码放、夹爪工具释放的操作。码垛块拾取位置如图5-1所示,码垛顺序及垛型如图5-2所示。
要求夹爪工具的拾取和释放均从Home点出发,最后完成操作后返回至Home点,工作原点Home对应工业机器人的姿态为五轴垂直向下,其余关节轴均为0度;码垛程序命名为MPalletizing1,夹爪工具拾取程序命名为MGet,夹爪工具释放程序命名为MPut。

图5-1 码垛平台A处码垛块拾取位置

图5-2 码垛垛型示意图
(2)系统备份
运行完成后,考生将工业机器人的系统文件重新命名。命名规则为姓名+准考证号(例如姓名:张三,准考证号:0001,命名为ZHANGSAN0001),并将程序备份到现场提供的U盘里。


