
项目二总结
-
1 总结与练习
-
2 项目评价
上一节
下一节
一 项目二总结
实操重点:转数计数器更新
实操难点:无
其它考点:示教器操纵杆速率调整、增量模式的使用等示教器手动运行快捷设置菜单应用
二 实操练习
任务1 转数计数器更新
1. 对齐同步标记
(1)切换工业机器人模式至手动模式档,将示教器中工业机器人操纵杆的速率调节为40% 。
(2 )手动操纵工业机器人进行单轴运动,使工业机器人6个关节轴依次(先4-6轴,后1-3轴)运动回机械原点,对齐同步标记。
2. 更新转数计数器
(1)检查示教器“编辑电机校准偏移”界面中的6个关节轴的偏移参数是否与机器人本体基座标签上的电机校准偏移数值相同,如不同则需修改为相同。
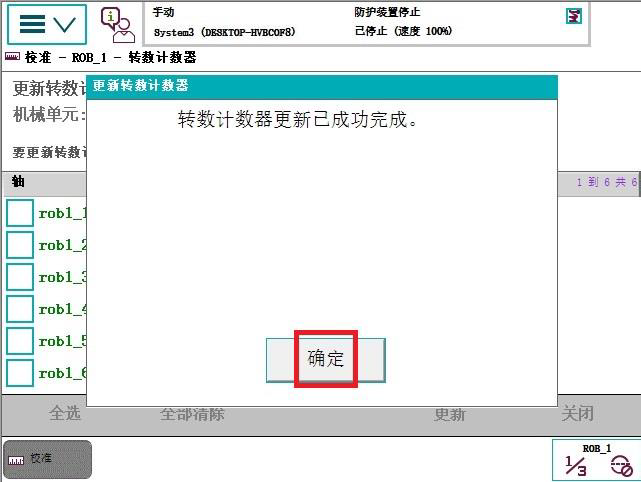
(2)完成工业机器人6个关节轴转数计数器更新的操作,并向教师展示示教器中“转数计数器更新已成功完成”的界面,如图所示。
任务2 工业机器人调试
工业机器人手动模式低速状态(30%运行速度)下,操作机器人进行单轴运行,按1-6轴顺序测试是否6个轴均能到达极限位置,并向教师展示示教器报警信息。

