
高程控制主要采用水准测量和三角高程测量的方法。
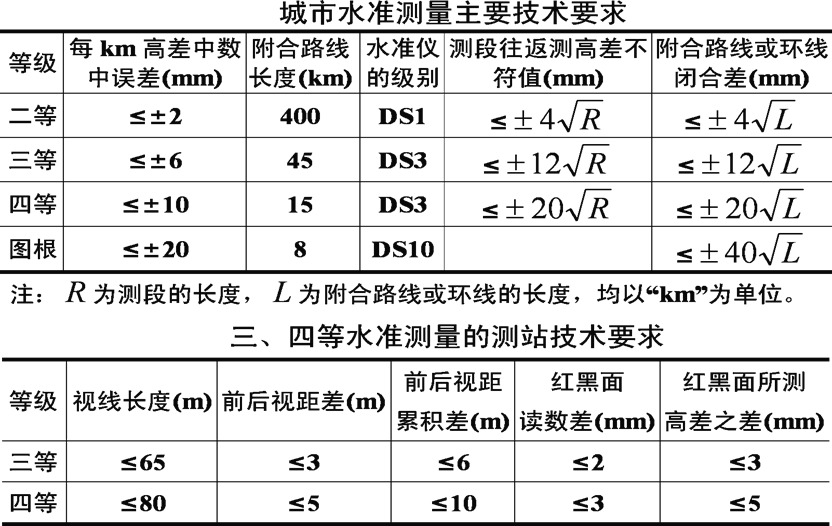
三、四等水准测量
三、四等水准测量,除用于国家高程控制网的加密外,还常用作小地区的首级高程控制。
1. 技术要求
三、四等水准测量通常采用双面尺。
2. 观测方法
三等水准测量采用中丝读数法进行往返测量。四等水准测量采用中丝读数法进行单程测量。
(1)一站观测方法
① 瞄准后视尺黑面,精平后分别读取上、下丝读数,再读取中丝读数;(填写到表格中的(1)、(2)、(3)位置)
② 瞄准前视尺黑面,精平后分别读取上、下丝读数,再读取中丝读数;(填写到表格中的(4)、(5)、(6)位置)
③ 瞄准前视尺红面,精平后读取中丝读数;(填写到表格中的(7)位置)
④ 瞄准后视尺红面,精平后读取中丝读数。(填写到表格中的(8)位置)
观测顺序为:“后—前—前—后”,目的是为了抵消水准仪与水准尺下沉产生的误差。
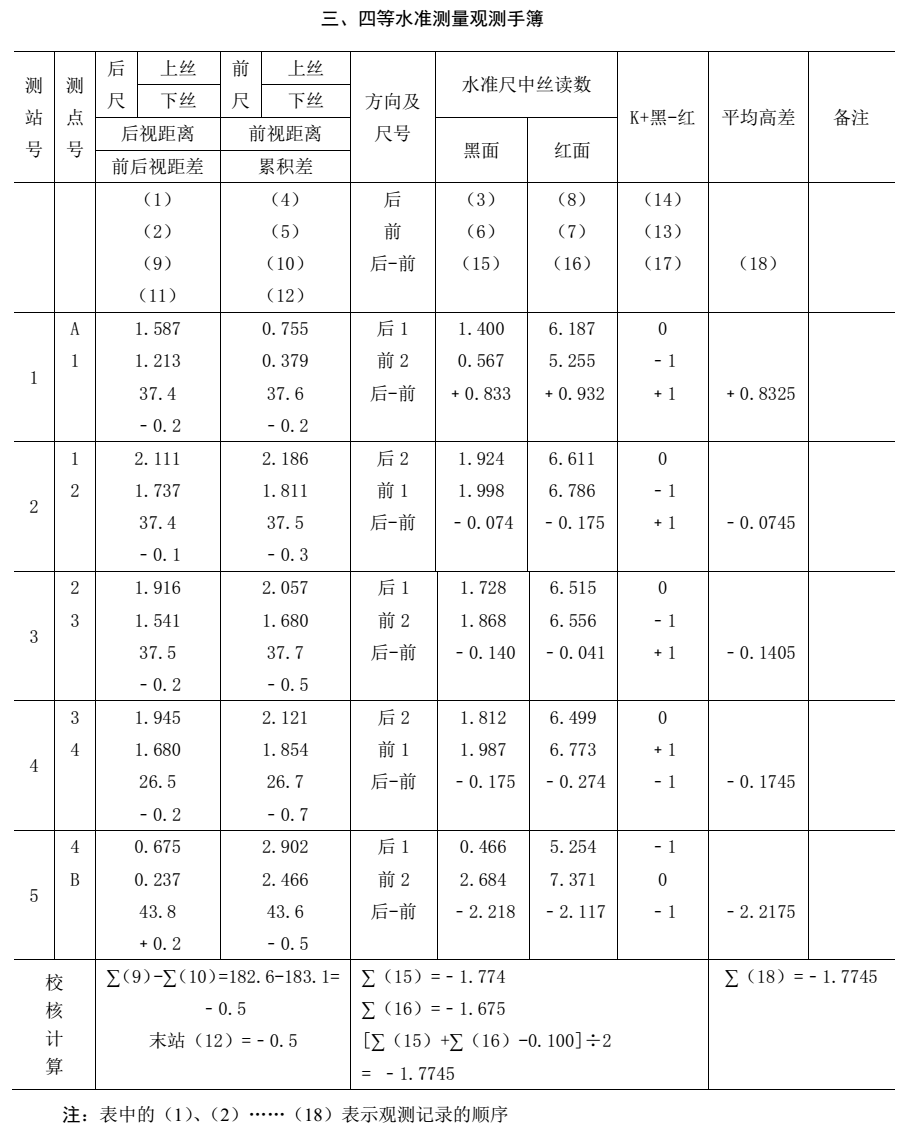
(2)测站的计算
① 视距计算
后视距离(9)=[(1)-(2)]×100
前视距离(10)=[(4)-(5)] ×100
前、后视距差(11)=(9)-(10)
前、后视距累积差,本站(12)=前站(12)+本站(11)
② 黑、红面读数差
前尺(13)=(6)+K1-(7)
后尺(14)=(3)+K2-(8)
K1、K2分别为前尺、后尺的红黑面常数差,本例K1=4.787m、K2=4.687m
黑面高差(15)=(3)-(6)
红面高差(16)=(8)-(7)
黑、红面高差之差(17)=(14)-(13)=(15)-(16)±0.100
高差中数(18)= [(15)+(16)±0.100]
(3)检核计算
① 前后视距差
② 视距差累计差
③ 同一水准尺黑红面读数差
④ 黑红面高差之差
⑤ Σ黑面后尺读数-Σ黑面前尺读数= Σ黑面高差
Σ红面后尺读数-Σ红面前尺读数= Σ红面高差
三角高程测量
当地形起伏较大而不便于施测水准时,可应用三角高程测量的方法测定两点间的高差而求得未知点高程。
该法简便灵活,常用做山区各种比例尺测图的高程控制。
1. 三角高程测量原理
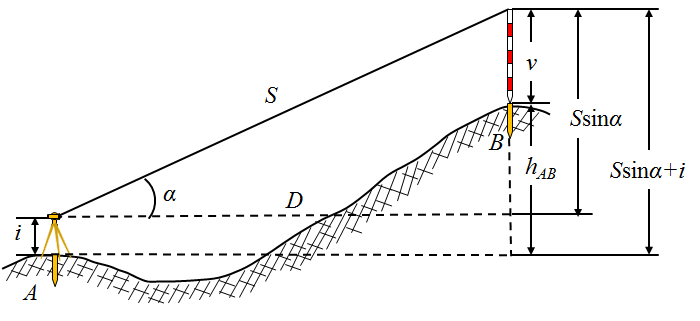
一般公式:
或
式中:
以上公式没有考虑地球曲率和大气折光对三角高程测量的影响,只适用于两点相距小于200m的三角高程测量。
若两点相距较远则要进行地球曲率和大气折光的改正。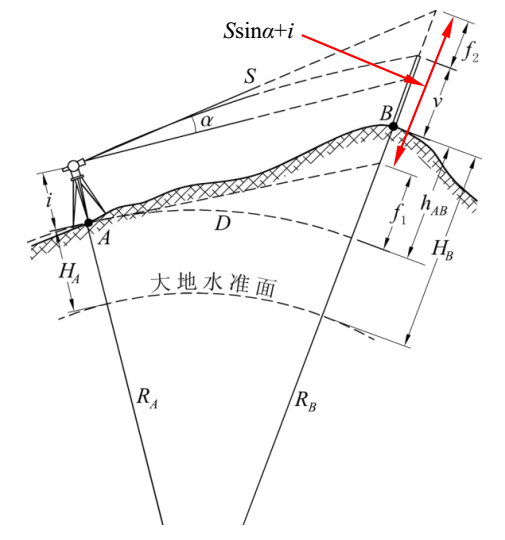
地球曲率的改正(球差改正):
大气折光改正(气差改正):
球差改正与气差改正之和(两差改正):
式中k为地球垂直折光系数,大约在0.08~0.14间,R地球半径。
严密公式:
或
减小两差改正误差的方法
在A,B两点同时进行对向观测,即由A点观测B点,称为直觇;由B点观测A点时,称为反觇。
取往返测高差的平均值
可抵消两差的影响
2. 三角高程测量的观测与计算
三角高程测量可与平面控制测量同时进行。
外业测量时,在角度测量前、后量取仪器高和觇标高。
竖直角观测的测回数、竖盘指标差的较差、竖直角较差,应满足规定。
正向观测结束后,应迅速进行反向观测。
对向观测较差应满足相应等级的技术要求。若符合要求,取两次高差的平均值。
| 电磁波测距三角高程测量的主要技术要求 | |||||
| 等级 | 测回数 | 竖盘指标差较差 〞 | 竖直角较差 〞 | 对向观测高差较差 mm | 附合或环形闭合差 mm |
| 四等 | 3 | ≤7 | ≤7 | ||
| 五等 | 2 | ≤10 | ≤10 | ||
| 图根 | 2 | ≤25 | ≤25 | ||
注:D为两点间水平距离,单位km。
距离测量要求采用电磁波测距仪观测,若与平面控制测量同时进行可不用单独测量距离。
| 三角高程测量记录计算 | ||
| 起算点 | A | |
| 目标点 | B | |
| 觇法 | 直觇 | 反觇 |
| 水平距离D(m) | 581.38 | 581.38 |
| 竖直角α | +11°38´30″ | -11°24´00″ |
| 仪器高i (m) | 1.40 | 1.51 |
| 目标高v(m) | 2.50 | 3.00 |
两差改正f(m) | 0.01 | 0.01 |
| 高差h(m) | +118.69 | -118.71 |
| 平均高差(m) | +118.70 | |
三角高程测量可组成闭合或附合路线。其路线闭合差应满足相应等级的技术要求。
如果闭合差未超限,则将闭合差反符号按与边长成正比分配给各高差,再按调整后的高差推算各点的高程。
三角高程测量成果计算
点 号 | 距离 (m) | 观测高差 (m) | 改正数 (cm) | 改正后高差 (m) | 高 程 (m) | |
A | 580 | +118.70 | -0.01 | +118.69 | 234.77 | |
B | 353.46 | |||||
490 | +57.25 | -0.01 | +57.24 | |||
| C | 410.70 | |||||
530 | -95.20 | -0.01 | -95.21 | |||
| D | 315.49 | |||||
610 | -80.71 | -0.01 | -80.72 | |||
A | 234.77 | |||||
2210 | +0.04 | -0.04 | 0 | |||
∑ | ||||||
| 辅助计算 | ||||||

