
交会测量(intersection survey)是根据多个已知点的平面坐标,通过测定已知点到某待定点(交会点)的方向或(和)距离,以推求此待定点平面坐标的测量技术和方法。是加密小地区平面控制点的方法之一。
交会测量分为:测角交会、测边交会、边角交会。
测角交会
测角交会是把经纬仪安置在已知控制点或待求点上观测相应的水平角,配合已知点坐标来推算待定点的坐标。
包括前方交会、侧方交会和后方交会三种。
1. 前方交会
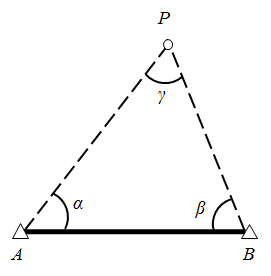
分别在两已知点A、B安置经纬仪,测得水平角α、β,计算交会角γ。
根据A、B 的坐标和观测的数据,按下式求算待定点 P 的坐标。


注意: 用此公式时A、B、P三点应按顺序逆时针编号,交会角 γ 应在30°~120°。
2. 侧方交会
分别在已知点A、待求点 P 安置经纬仪,测得水平角α、γ,计算水平角 β。
坐标计算同前方交会。
3. 后方交会
后方交会是在待求点安置仪器,根据已知点(最少三个点)的坐标和测量数据计算待求点坐标。其有两种情况:
(1)待求点 P 在三已知点构成的三角形内
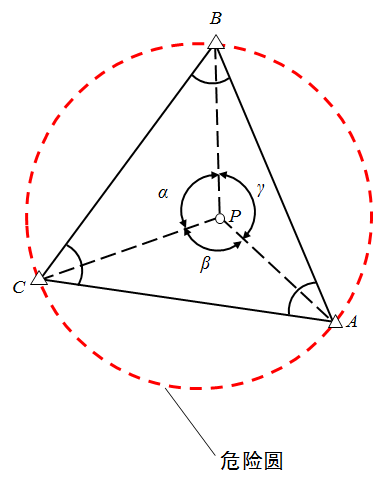
在在待定点 P 安置仪器,测得水平角 α、 β、γ。根据已知点A、B、C的坐标推算出∠A、∠B、∠C,按下式计算 P 点坐标。
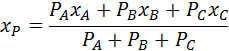
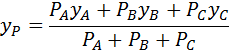
式中:
注意:应用以上公式时,A、B、C的编号必须按逆时针方向编号,∠A和α、∠B和 β、∠C和γ 必须是同方向的角度。
(2)待求点 P 在三已知点构成的三角形外
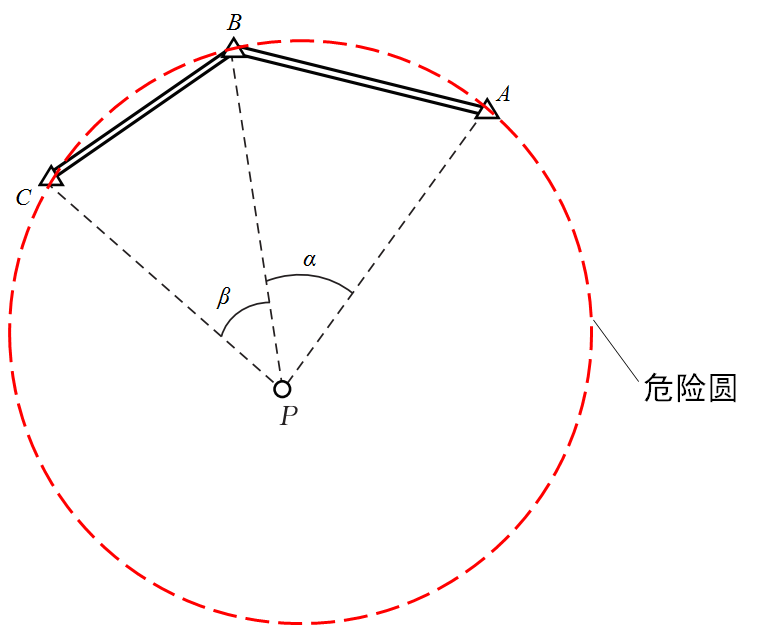
在在待定点 P 安置仪器,测得水平角 α、 β,根据已知点A、B、C 的坐标按下式计算 P 点坐标。


式中:



注意:应用以上公式时,P、A、B、C 的编号必须按逆时针方向编号。
危险圆:由三个已知点构成的圆称为危险圆,待求点P 不应出现在危险圆上。
测边交会(距离交会)
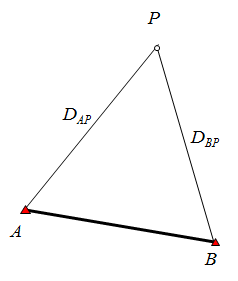
在已知点A、B安置仪器,测得距离 DAP、 DBP;
根据A、B点的坐标,计算出AB的距离 DAB 和坐标方位角 αAB;
利用余弦定理求算出∠A:

则AP的坐标方位角: αAP= αAB-∠A
P点坐标:


边角交会(极坐标法)
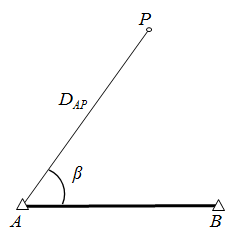
在已知点A 安置仪器,测得水平距离DAP、水平角 β;
根据已知点A、B点的坐标,计算出AB的坐标方位角 αAB;
则AP的坐标方位角: αAP= αAB- β
P点坐标:

