
在新布设的平面控制网中,至少需要已知一条边的坐标方位角才可以确定控制网的方向,称为定向;至少需要已知一个点的平面坐标,才可以确定控制网的位置,称为定位。一条边的坐标方位角和一个点的平面坐标为控制网的起算数据。
在测区内有高等级的控制点的情况下,将高等级的控制点布设到控制网内进行测量,此过程称为连测。高等级的控制点为平面控制网提供起算数据和检核数据。
坐标方位角推算
在实际工作中并不需要测定每条直线的坐标方位角,而是通过已知方位角和测定的已知直线与待求直线间的转折角,推算出各条直线的坐标方位角。
所测转折角位于推算路线前进方向的右侧,称为右角;位于左侧,称为左角。
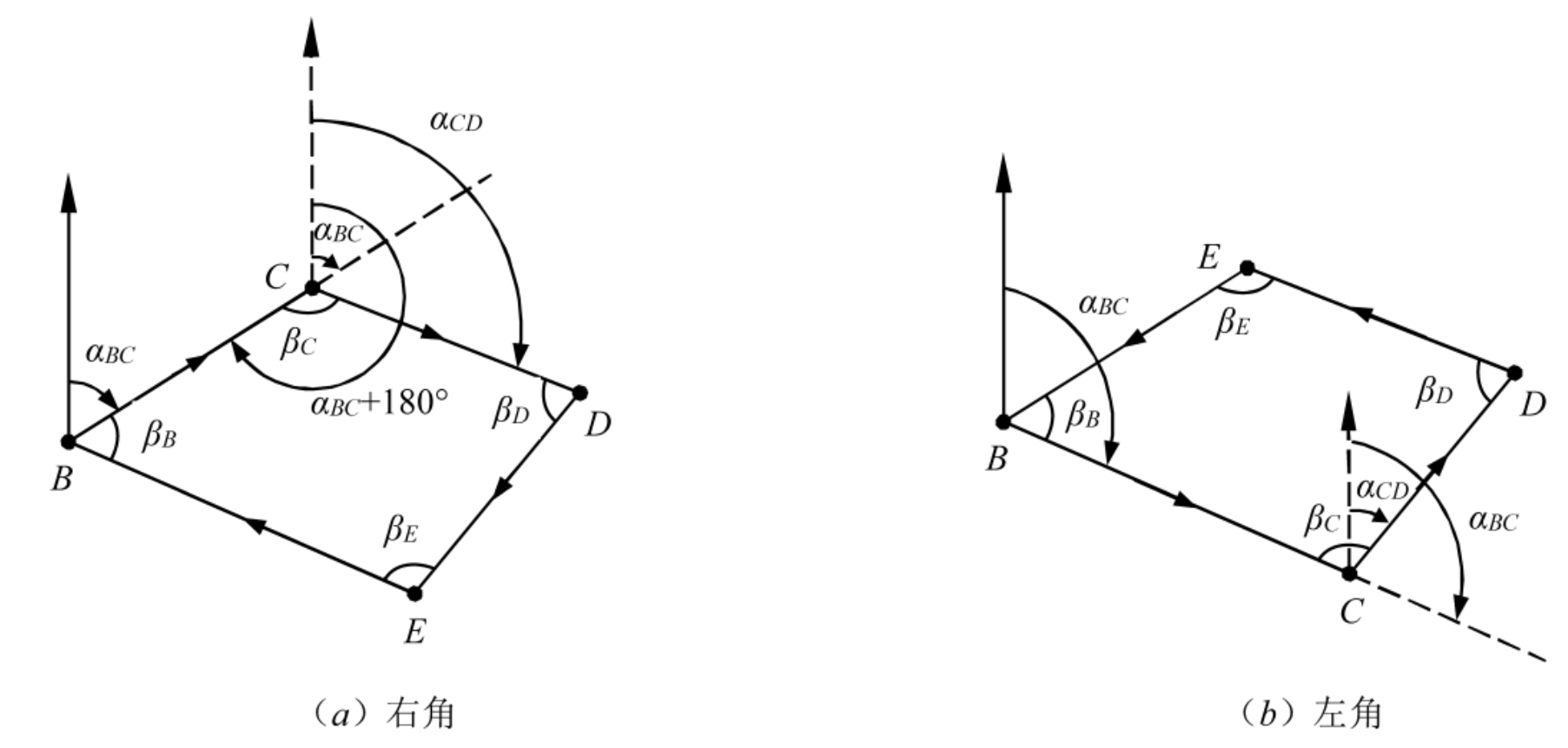
图(a)中,αBC 为起始方位角,转折角 βC 为右角,推算 CD 边的坐标方位角为:

因此,右角公式为:
同理,左角公式为:
式中: α前 表示前一条边的方位角; α后 表示后一条边的方位角;β 为前后导线边间的转折角。
注意:推算出的方位角 α 若大于360°,则应减去360°;若小于0°,则应加上360°。
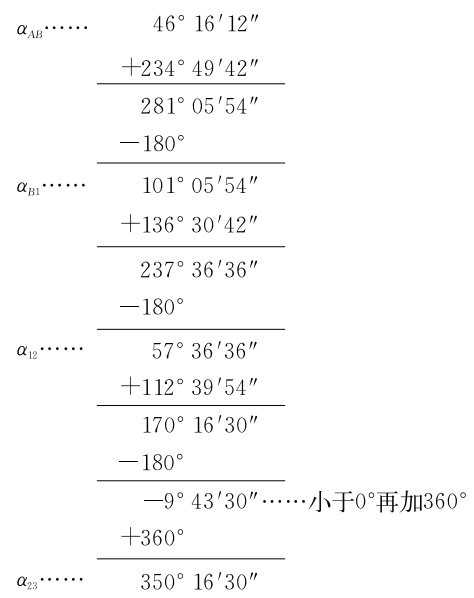
【例】 αAB已知,观测角βB、β1 及β2 为左角,角值均注于下图,试求其余各边坐标方位角。
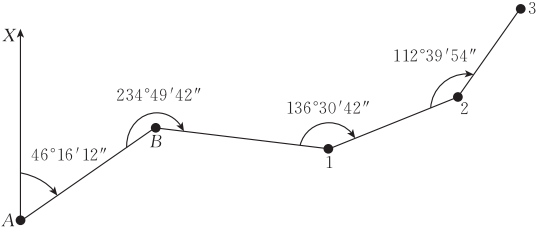
【解】用竖式计算如下:
坐标增量计算
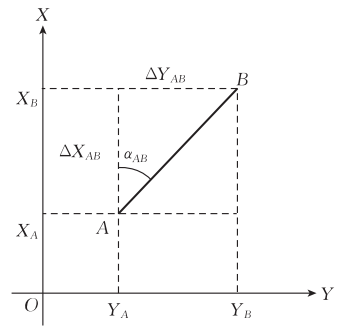
如图所示,设直线两端点A 和B 的坐标分别为XA、YA和XB、YB。两点间的坐标值之差称为坐标增量(亦称坐标差),纵坐标增量以ΔX 表示,横坐标增量以ΔY 表示。若A 为始点,B 为终点,则A 至B 的纵、横坐标增量分别为:
ΔXAB = DABcosαAB
ΔYAB = DABsinαAB
坐标正算
根据直线始点的坐标、直线长度及其方位角,计算直线终点的坐标,称为坐标正算。
XB = XA + ΔXAB = XA + DABcosαAB
YB = YA + ΔYAB = YA + DABsinαAB
【例】已知N 点的坐标为XN=376 996.541m,YN=36 581 528.629m,NP 的水平距离DNP=484.759m,NP 的坐标方位角αNP=259°56′12″,求算P 点坐标XP、YP 。
【解】坐标增量:
ΔXNP = DNPcosαNP = 484.759×cos259°56′12″ = -84.705 (m)
ΔYNP = DNPsinαNP = 484.759×sin259°56′12″ = -477.301 (m)
P 点坐标:
XP = XN + ΔXNP =376 996.541+(-84.705) = 376 911.836(m)
YP = YN + ΔYNP =36 581 528.629+(-477.301) = 36 518 051.328(m)
坐标反算
根据直线始点和终点的坐标,计算直线的边长和坐标方位角,称坐标反算。
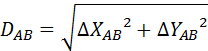
AB 的水平距离为:
为了便于方位角计算引入象限角。
从标准方向的北端(或南端)顺时针(或逆时针)量至某直线的锐角,称为该直线的象限角,一般用R 表示,取值范围 0°~90°。
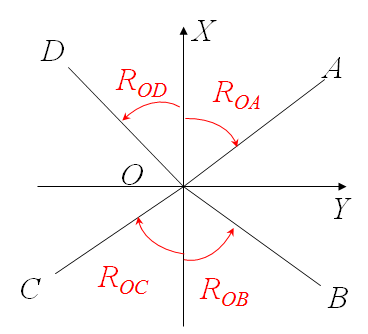
象限角如仅用一个角值来表示,还不能完全确定一直线对东南西北方向的关系。因此,要在角值之前冠以直线所在象限的名称。I 象限:北东(NE),II 象限:南东(SE),III 象限:南西(SW),IV 象限:北西(NW)。
上图中,直线OA、OB、OC、OD 的象限角应写为:北东 ROA、南东ROB、南西ROC、北西ROD 。
方位角与象限角之间的换算关系,可根据直线所在的象限位置来确定。
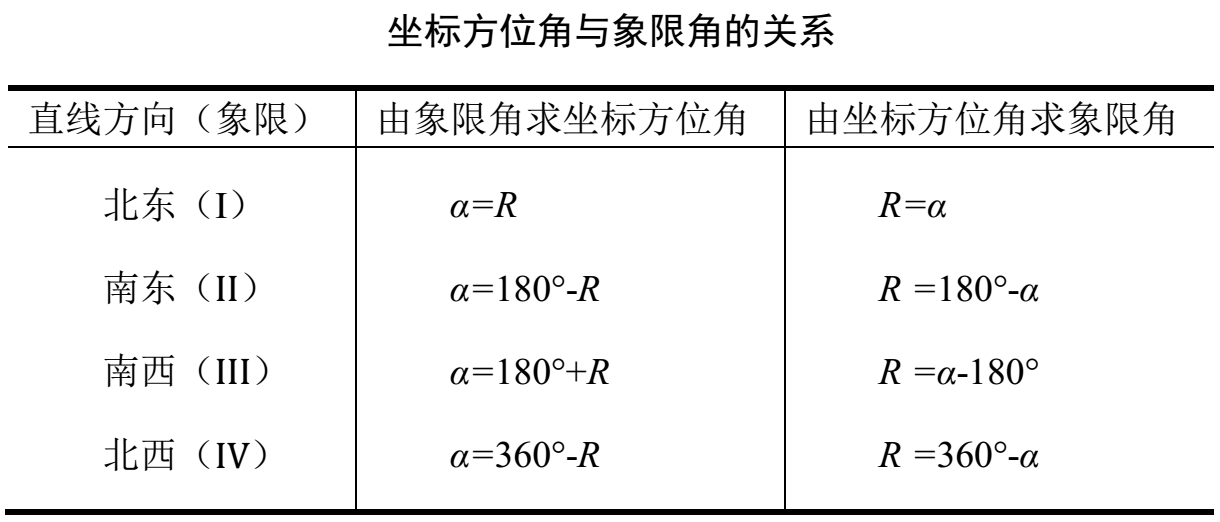
AB的象限角为:
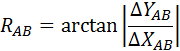
算出象限角R 后,应根据ΔX 、ΔY 的正负号,判断象限角所在的象限,并将象限角R 换算为坐标方位角α。
【例】已知A、B两点的坐标分别为XA=70 025.283m,YA=18 065.642m;XB=69 891.879m,YB=18 257.454m。求算AB 的水平距离DAB 及坐标方位角αAB 。
【解】AB的坐标增量:
ΔXAB =XB-XA= 69 891.879-70 025.283=-133.404 (m)
ΔYAB = YB-YA = 18 257.454-18 065.642=191.812 (m)
AB的水平距离:

AB的象限角:

ΔXAB 为负,ΔYAB为正,AB 位于第二象限,故AB 的坐标方位角为:
αAB=180°-RAB =180°-55°10′54″= 124°49′06″

