航线基本认识
上一节
下一节
3.1 航线基本认识
航线的构成

航线由航路点构成。
生成航路点的工具
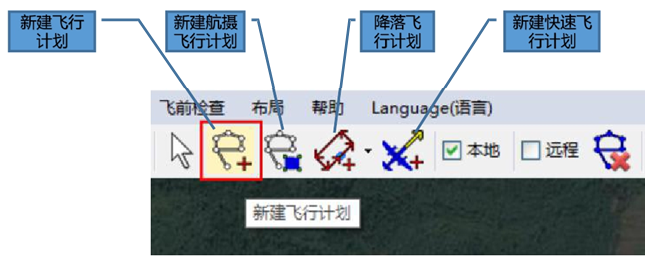
新建飞行计划
生成航线
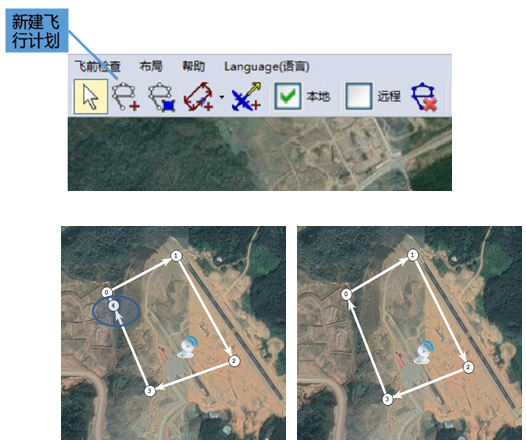
鼠标左键在地图中键入航路点,并在结束规划时靠近将要与其闭合的航路点进行双击。最终会在双击点位置生成一个航路点,且与下一个航路点闭合。
一套完整航线必须封闭!
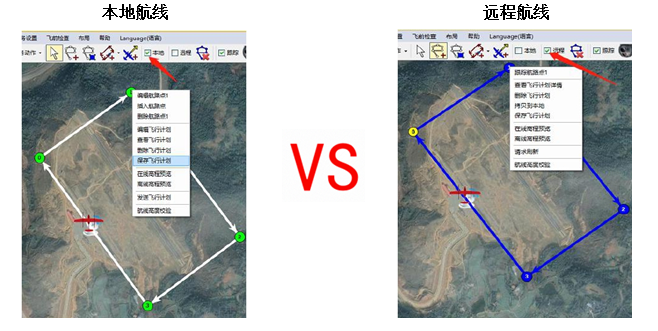
本地航线:在本地进行规划且未发送到自驾仪,航路点或飞行计划是可编辑的,以白色表示。

编辑航路点:对单个航路点要素进行编辑。
插入/删除航路点:指对本地航线中的航路点进行增加或删除。
编辑/查看/删除/保存飞行计划:指对本地航线整体进行编辑/查看/删除/保存(保存格式为xml)。
发送飞行计划:将白色本地航线发送至自驾仪远程航线。
高程预览/高度校验:指在有离线高程数据前提下可进行航线安全性检查。
航路点要素

位置(经纬高):以经度、纬度、高程(海拔/相对)确定无人机飞行目标点的空间位置。
盘旋:无人机以目标航路点为中心做圆周运动的飞行方式。
过低盘旋:无人机当前位置比目标航路点低,执行盘旋爬升,到达目标高度后退出盘旋且跟踪
下一航路点。
过高盘旋:无人机当前位置比目标航路点高,执行盘旋降高,到达目标高度后退出盘旋且跟踪
下一航路点。
极限盘旋半径:CW-10(110米)。
任务动作:预转弯:利用GPS导航提前量,在到达目标航路点之前提前执行转弯动作。
坡度:在无人机最大俯仰角范围内,沿着有高差的航路点间坡度飞行。
照相:从此航路点位置开始,持续给出拍照信号。
远程航线:通过“发送飞行计划”将本地航线发送至自驾仪保存,且无法对航路点或飞行计划进行编辑,以蓝色表示。
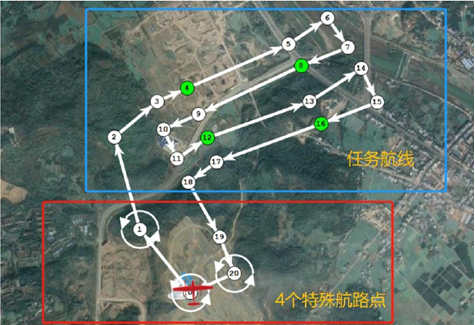
飞行计划由特殊航路点与任务航线构成。