1.2 无人机系统组成
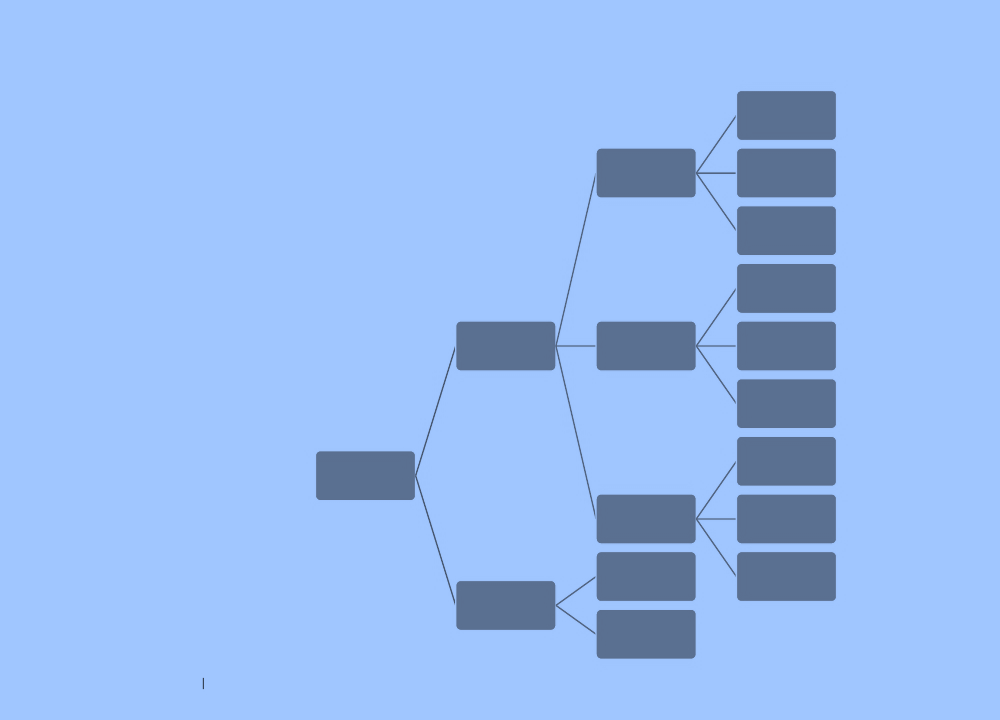
大鹏无人机系统组成
无人机飞行平台由以下系统构成:
大鹏无人机固定翼系统包含以下控制舵面:
1. 副翼 2. 升降舵 3. 方向舵
副翼舵面控制滚转运动,方向舵面控制偏航运动,升降舵面控制俯仰运动
 机身及功能仓
机身及功能仓
平飞动力:提供飞机固定翼飞行动力装置。CW20\30为活塞发动机,CW10为电机。
大鹏无人机旋翼系统由以下几部分组成:
1. 左右旋翼机臂 2. 旋翼螺旋桨 3. 旋翼电机 4. 电子调速器
无刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连,定子是绕组线圈,去掉了有刷电机用来交替变换电磁场的换向电刷,故称之为无刷电机(Brushless motor)。 无刷电机由于取消了碳刷结构,需要能替代碳刷功能的部件——电调,电调负责将直流电转换为三相电,并根据需要控制其电压电流大小,从而驱动无刷电机实现需要的转速输出。
电池S数的意义:
代表电池的节数,锂电池1节标称电压为3.7v,满电电压为4.2V,那么4S电池,就是代表有4个 3.7V电池串联在里面,标称电压为14.8V,满电电压为16.8V。
高压版电池(G):单片标称电压3.8v,满电电压4.35v,采用高压版充电程序充电。
电池容量:锂电池容量是指给一个电池进行恒流恒压充电,然后以恒流放电,放出多少电量就是这个电池的容量。容量表示方法一般有: mAh 和 Wh。 例:1000 mAh 表示以 1000 mA电流放电,可以连续放电一小时;1000 Wh表示以 1000瓦 (W)的功率放电,可以连续放电一小时。“1000mAh”代表电池的容量,mAh其实是mA×h的 概念,即电流×时间,1000mAh是1000mA(毫安)的电流持续放电1h(小时)的电量. PS:换算公式:Wh=mAh/1000 x V(x代表乘以,V代表工作电压)
电池充电C数的意义:
C数代表电池放电能力,这是普通锂电池和动力锂电池最重要区别,动力锂电池需要很大电流放 电,这个放电能力就是C来表示的。如1000mAh电池标准为5C,那么用5x1000mAh,得出电池可 以以5000mA即5A的电流强度放电。 如果用低C的电池,大电流放电,电池会迅速损坏,甚至自燃。为了电池健康,建议充电采用 1C或1C以下充电较好。 例如:10000mAh锂聚合物电池最大充电电流为10A。

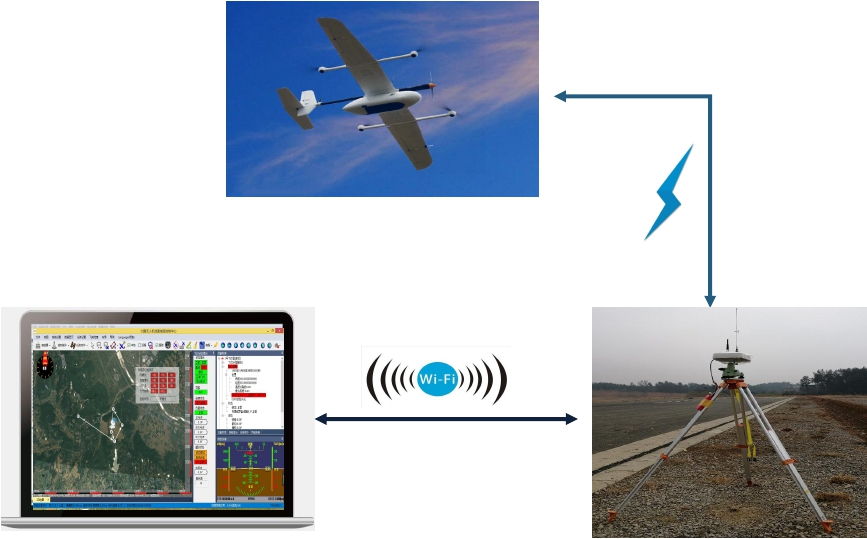
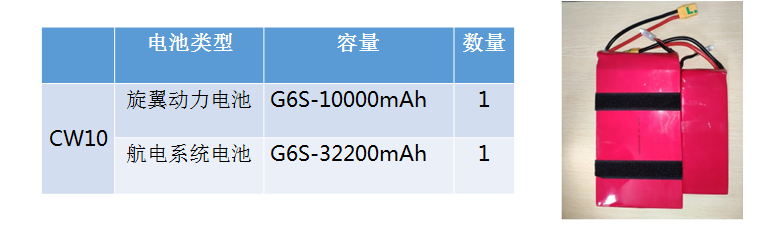
能源系统:CW-10为纯电动无人机,飞机动力主要由锂聚合物电池提供。
电池使用注意事项
1、电池长期不使用,保存方法:
储存环境:电池应保存在4℃~25℃的干燥环境中或者防潮包装。要远离热源,也不要置于阳光直射的地方。储存电压:3.8~3.9V(最佳储存电压为3.85V左右)。
2、锂电池存在的自放电现象,如果电池电压在3.6V以下长时间保存,会导致电池过放电而破坏电池内部结构,减少电池寿命。因此长期保存锂电池应当每月进行一次补电。
3、电池充电时,必须有人看守。
4、旋翼动力电池在温度较低环境(低于15℃)下使用时,可提前在车内开暖气加热,在需要时才取出放于飞机内。并给动力电池贴上暖宝宝自发热贴保温,提高动力电池在起降过程中的放电能力,保证起降安全。
5、执行飞行任务时,动力电池只能使用一个起落。
6、每次飞行任务前必须给全部电池补满电。
7、防止受到剧烈撞击。

