视觉传感器
视觉传感器于20世界50年代后期出现,发展十分迅速,是机器人中最重要的传感器之一。机器人视觉从20世纪60年代开始首先处理积木世界,后来发展到处理桌子、椅子、台灯等室内景物,进而处理室外的现实世界。70年代后,有些实用性的视觉系统出现了,如应用于集成电路生产、精密电子产品装配、饮料灌装箱场合的检验、定位等。另外,随着这门学科的发展,一些先进的思想在人工智能、心理学、计算机图形学、图形处理等领域产生出来。
视觉传感器是以机器视觉为基础的新型检测装置,具有测量时非接触、速度快、信息量大、应用领域广等特点。视觉检测系统通常由计算机、视觉传感器(VisionSensor)和控制系统三大模块组成。
机器人视觉的作用是从三维环境图像中获得所需的信息并构造出观察对象的明确而有意义的描述,视觉包括三个过程:图像获取、图像处理和图像理解。图像获取即通过视觉传感器将三维环境图像转换为电信号;图像处理是指图像到图像的一种变换,如特征提取;图像理解则在处理的基础上给出环境描述。视觉传感器的核心器件是摄像管或CCD,摄像管是早期产品,CCD是后发展起来的。目前的CCD已能做到自动聚焦。
1. 视觉传感器的基本原理
视觉传感器是指通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功能是获取足够的机器视觉系统要处理的最原始图像。
视觉传感器能从一整幅图像中捕获数以千计的像素。图像的清晰和细腻程度通常用分辨率来衡量,以像素数量表示。Banner工程公司提供的部分视觉传感器能够捕获130万像素。因此,无论距离目标数厘米或数米远,传感器都能“看到”十分细腻的目标图像。
在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比较,以做出分析。例如,若视觉传感器被设定为辨别正确地插有八颗螺栓的机器部件,则传感器知道应该拒收只有七颗螺栓的部件,或者螺栓未对准的部件。此外,无论该机器部件位于视场中的哪个位置,无论该部件是否在范围内旋转,视觉传感器都能做出判断。
视觉检测一般基于三角法,由摄像机、光源和被测物体构成测量三角,CCD相机把光源透射到被测物体表面,经过调整后的三维深度信息转换成二维图像传给计算机,再经由图像处理、特征提取等恢复解调出被测物体的三维形貌信息。简单的结构光视觉传感器可由一个平面结构光投射器与一个CCD摄像机组成,但当物体表面曲率变化比较大时,有时会出现死区现象,即光平面与物体表面的交线被旁边的曲线遮挡,使摄像机无法看到该交线,以致测量信号消失。为了避免在测量复杂表面物体时产生的死区现象,可用两个相机对称分布于光平面两侧,接收光条的漫反射光。
2. 视觉传感器的检测系统组成
视觉传感器的控制电路(MCU)主要包括视频切换、电源供给和CAN通信接口三个模块。电源供给电路模块提供CCD摄像机、激光投射器与MCU的电源,并且由MCU控制单元控制着它们的开启与关闭。为了避免激光投射器使用时间过长导致激光器(或普通照明光源)发热,引起光能分布不稳或视觉传感器受热变形,从而影响测量精度,以及延长投射器的使用寿命,当传感器开始测量时,先上电初始化,再打开激光器,测量完毕后即关闭光源电源。由于每个传感器里面含有个CCD相机,而任一时刻传感器只能输出一路视频信号,因此需要视频切换开关对两路视频信号进行自动分时切换。
3. 视觉传感器的应用
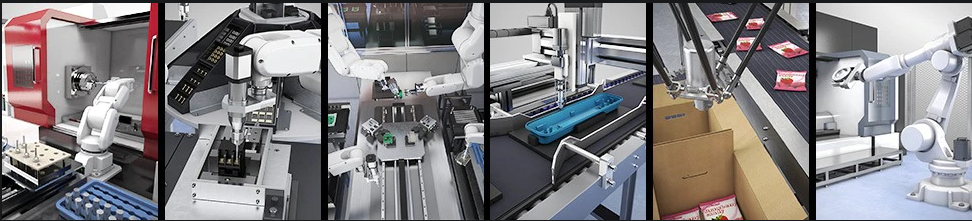
视觉传感器的应用很多,如监视机器人作业、精密地确定位置以便在集成电路芯片上进行焊接、引导机器人的移动、检查药片的缺陷等,这些都是典型的实用例子。机器人视觉在装配工作中的重要程度近似为30%(包括搬运、进给、组装等),在自动检测中超过50%,在柔性制造系统中,机器人视觉在监控及柔性定向装置的支撑和插入控制中起到极其重要的作用。
近年来,随着传感器技术的发展,视觉传感器已应用于多个领域中,其典型应用领域为组装、自主式智能系统和导航。在组装过程中,局部和整体需求都要用到计算机视觉。元件的定向和定位,机器人手腕或手爪的一个零件,以及元件的检验或工具放在夹具中都被认为是局部需求。元件的位置或用于安装工艺的机器人工作空间的一个零件被认为是全局需求。机器人视觉主要被用于全局需求,安装过程中组装件的定位。
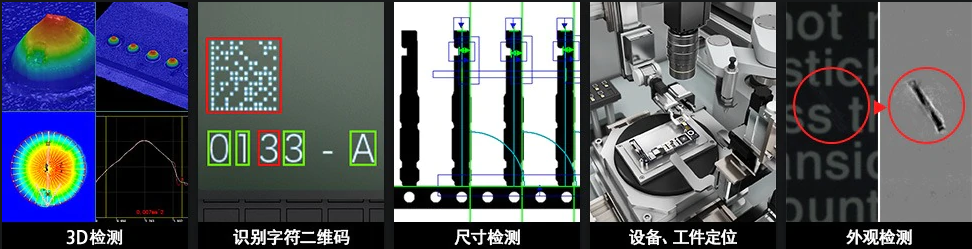
随着计算机技术、人工智能、光电检测、图像处理及模式识别等各学科的不断发展和相互渗透,视觉检测技术作为一种多领域、多学科交叉的技术已经取得了突飞猛进的发展。视觉检测技术广泛应用于产品质量的在线监测,自动巡视商店、银行或其他重要场所的安防监视,产品的标签文字标志检查,纺织印染业中的自动分色、配色,大型物体三维结构尺寸的测量,各种复杂三维表面形状的检测、恢复重构以及逆向工程等领域。