

机器人传感器
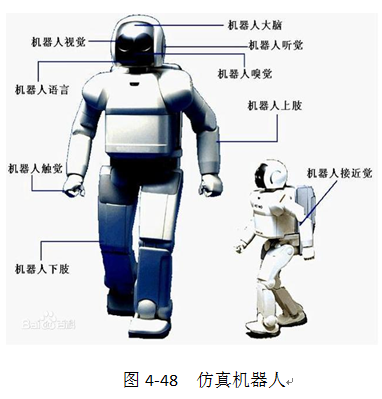
机器人是自动控制机器(Robot)的俗称,包括一切模拟人类行为或思想、模拟其他生物的机器。传感器在机器人的控制中起到了非常重要的作用,有了传感器的使用,才能使机器人具备类似人类的知觉和反应能力。图4-48为仿真机器人。
根据监测对象的不同,机器人传感器可分为内部传感器和外部传感器。内部传感器用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器;外部传感器用来检测机器人所处环境及状态,如离障碍物距离等。
为了检测作业对象及环境或机器人与它们的关系,在机器人上安装了触觉传感器、视觉传感器、接近觉传感器、力觉传感器和听觉传感器,大大改善了机器人工作状况,使其能够更充分地完成复杂的工作。
1. 机器人触觉传感器
研制满足需求的触觉传感器使机器人发展中的关键技术之一,触觉传感器按功能大致可以分为接触觉传感器、扭矩传感器、压觉传感器和滑觉传感器。
(1)触觉传感器
触觉传感器用于判断机器人是否接触到外界物体或用于测量被接触物体的特征。图4-49为机器人触觉传感装置。接触觉传感器有微动开关、导电橡胶、含碳海绵、碳素纤维、气动复位式装置等。

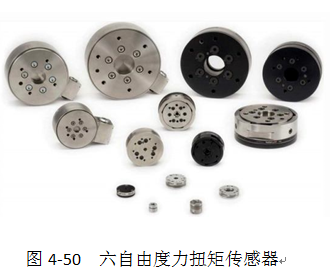
(2)扭矩传感器
扭矩传感器用来检测各种旋转或非旋转机器部件对扭转力的感知,通常安装在机器人各关节处。图4-50为六自由度力扭矩传感器。
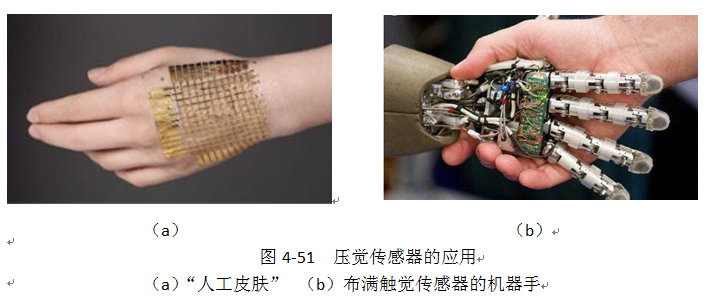
(3)压觉传感器
压觉传感器是用来测量接触外界物体时所受压力和压力分布的装置。它主要用于机器人对接触对象的几何形状和硬度的识别。压觉传感器的敏感元件可由各类压敏材料制成,常用的有压敏导电橡胶、丝状碳素纤维片和绳状导电橡胶的排列面等。图4-51为压觉传感器的应用。
(4)滑觉传感器
滑觉传感器用于判断和测量机器人抓握或搬运物体时所产生的滑移,实际上它是一种位移传感器。
2. 机器人的视觉传感器
视觉传感器是整个机器视觉系统信息的直接来源,它相当于机器人的眼睛,主要由一个或多个图形传感器组成,有时还需配以光投影仪等辅助设备。视觉传感器获取的是最原始的图像,机器人控制系统还需将原始图像进行特征提取识别、颜色检测等算法的处理,并根据处理结果控制机械部分做出相应的运动。图4-52为视觉传感器的应用。

3. 接近觉传感器
(1)接近觉传感器的作用
接近觉传感器能使机器人在接近物体时,感知对象和障碍物的位置、姿势、运动等,具有视觉和触觉的中间功能。接近觉传感器主要具有以下三个作用:
①在接触对象物体前得到必要的信息,以便准备后续动作;
②发现前方有障碍物时限制行程,避免碰撞;
③获取对象物体表面各个点间距离信息,从而测出对象物体表面形状。
(2)接近觉传感器的分类
接近觉传感器主要分为以下四类,图4-53为各类接近觉传感器。
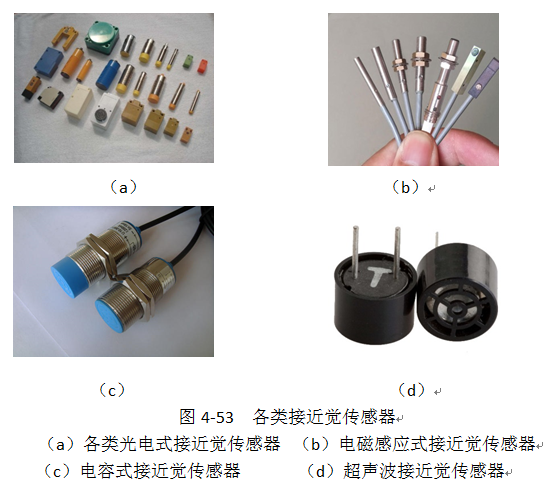
①光电式接近觉传感器:应答性好,维修方便,测量精度高,应用广泛,但其信号处理相对复杂,受使用环境限制。
②气压式传感器:其原理非常简单,只需提供一个恒定的压力源,由于受空气污染程度的影响,其零位和飘移较大,测量精度较低,但是把气压式传感器作为模拟传感器接近开关来使用是非常合适的。
③电磁感应式接近觉和电容式接近觉传感器:在特定工作环境下使用较理想,它相应好、精度高、信号处理容易、维修方便,很适合焊接机器人。
④超声波接近觉传感器:在短距离测量时,精度不高,但是测距的范围广,适合较长距离的测量,一般用于移动机器人的路径探索和躲避障碍物。

