
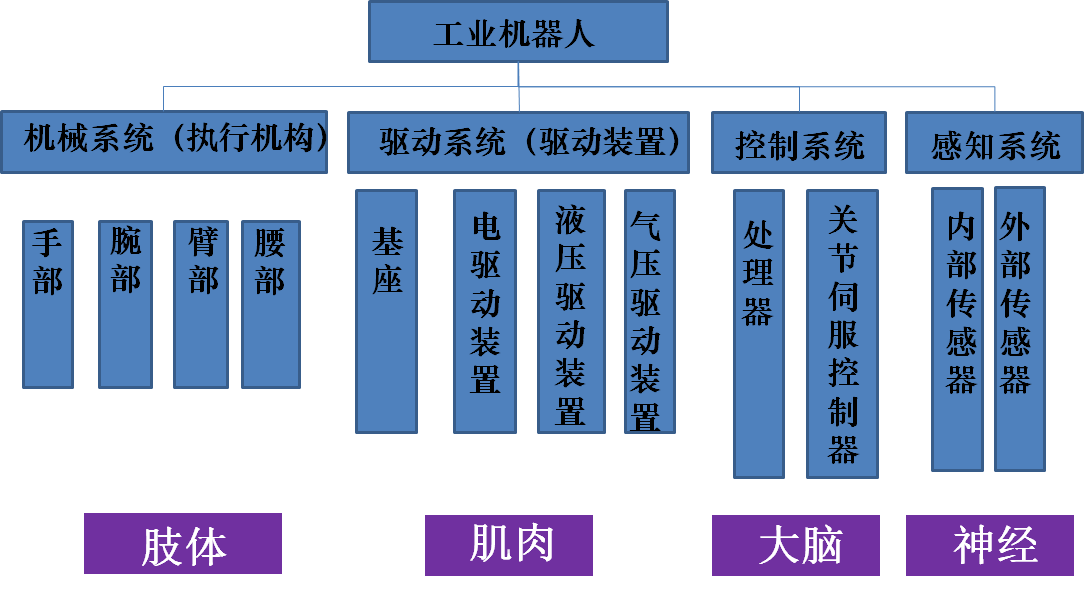
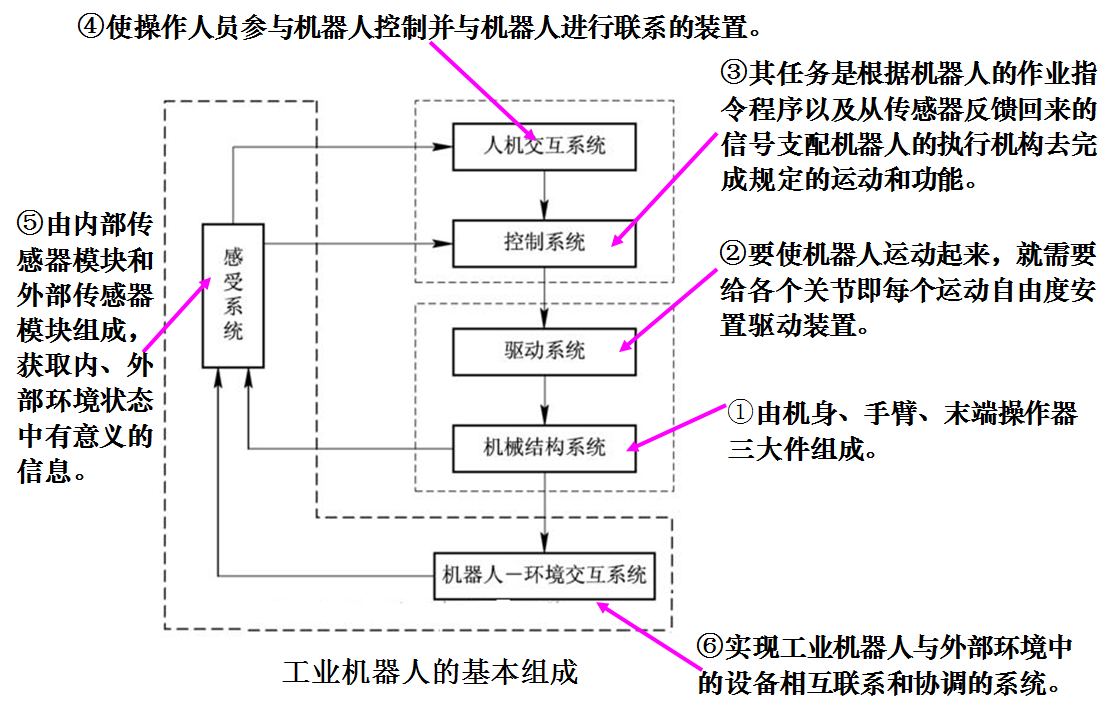
工业机器人的组成与技术参数
上一节
下一节
工业机器人的主要技术参数一般应有:自由度, 重复定,工作范围,承载能力及最大工作速度。
1.自由度(Degree of Freedom,DoF)
自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度
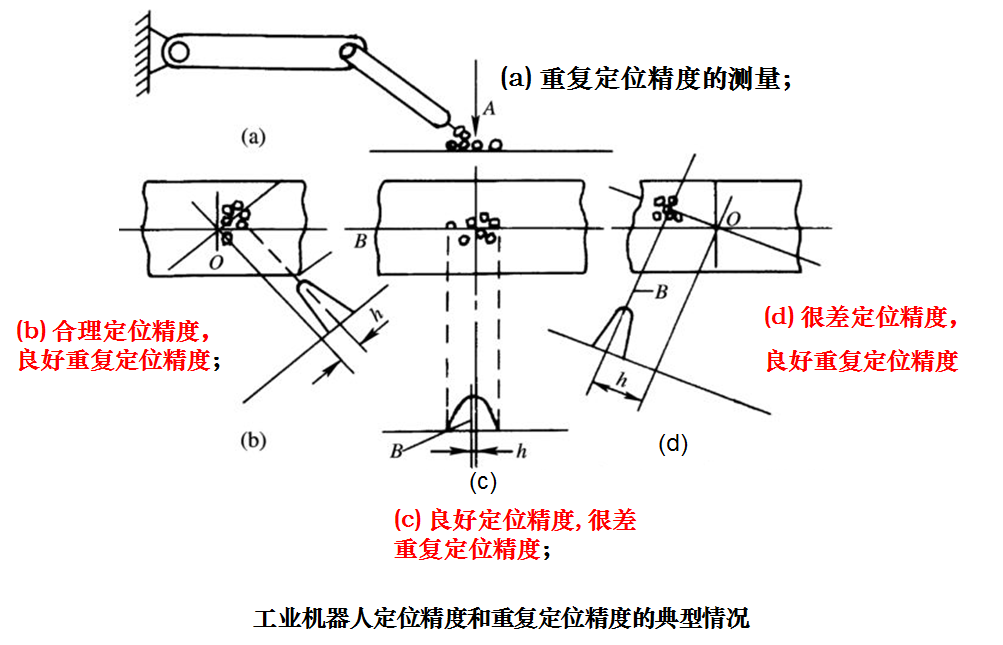
2.精度(Accuracy)
工业机器人精度是指定位精度和重复定位精度。 定位精度是指机器人手部实际到达位置与目标位置之间的差异。 重复定位精度是指机器人重复定位其手部于同一目标位置的能力, 可以用标准偏差这个统计量来表示, 它是衡量一列误差值的密集度(即重复度), 如下图所示。
3.工作范围(WorkSpace)
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合, 也叫工作区域。因为末端操作器的尺寸和形状是多种多样的, 为了真实反映机器人的特征参数, 所以, 这里是指不安装末端操作器时的工作区域
4.速度(Speed)
速度和加速度是表明机器人运动特性的主要指标。说明书中通常提供了主要运动自由度的最大稳定速度,但在实际应用中单纯考虑最大稳定速度是不够的。所以, 考虑机器人运动特性时, 除注意最大稳定速度外, 还应注意其最大允许的加减速度。
5.承载能力(Payload)
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。承载能力不仅决定于负载的质量, 而且还与机器人运行的速度和加速度的大小和方向有关。为了安全起见, 承载能力这一技术指标是指高速运行时的承载能力。 通常, 承载能力不仅指负载, 而且还包括了机器人末端操作器的质量。
机器人有效负载的大小除受到驱动器功率的限制外, 还受到杆件材料极限应力的限制, 因而, 它又和环境条件(如地心引力)、运动参数(如运动速度、 加速度以及它们的方向)有关。
