
机器人的分类
上一节
下一节
按照机器人的发展程度分类:
n 第一代机器人: 示教再现型,通过手动或其它方式,先引导机器人动作,记录下工作程序,机器人则自动重复进行作业。
n 第二代机器人: 带感觉(感知型)的机器人,带力觉、触觉、视觉······ ;利用传感器获取的信息控制机器人的动作。机器人对环境有一定的适应性。
n 第三代机器人: 智能机器人,只需要告诉它 “做什么?”,不用告诉它 “怎么做?”,它有运动、感知、思维、人机交互功能。机器人具有感知和理解外部环境的能力,即使环境发生变化,也能够成功的完成任务。
按照机器人控制方式分类:
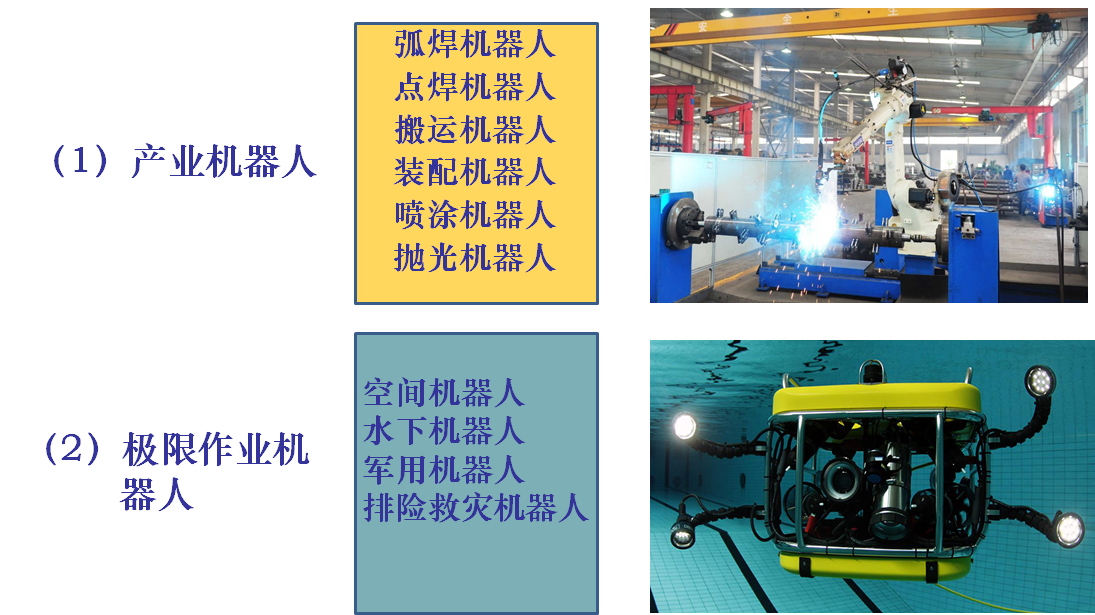
按照机器人应用领域分类:
 1)产业机器人
1)产业机器人
2)极限作业机器人 
 3)服务型机器人
3)服务型机器人

n工业机器人的关节
最常见的关节是移动关节(prismaticjoint)和回转关节(revolutejoint)
刚体在三维空间中有6个自由度,显然,机器人要完成任一空间作业,也需要6个自由度。
n五种坐标形式的机器人
(1)直角坐标型机器人
(2)圆柱坐标型机器人
(3)球(极)坐标型机器人
(4)关节坐标型机器人(PUMA, KUKA)
(5)SCARA型机器人(Selectivecompliance assembly robot arm)(装配机器人)
3D Puma Robot Demo
http://www.mathworks.com/matlabcentral/fileexchange/14932-3d-puma-robot-demo
