先修课程: 线性代数、高等数学、大学物理、工程制图基础、工程力学 和大学英语。
其中,涉及的线性代数和高等数学内容部分难度不大,但仍希望同学们复习先修课程中的部分相关内容。
1.现代机器人的产生背景
n第二次世界大战结束后,各国加强经济发展,为机器人的产生提供了社会条件。
n机器人产生是生产力发展的客观需要,是人类自身发展的必然结果。通过机器人实现人类智能和体力的扩展,机器人成为人类的“奴隶”,代替人类从事危险和繁重的体力劳动,实现人类对不可达世界的认识和改造。
n电子技术、计算机技术以及制造技术的发展为机器人的产生提供了技术保证。
2.为什么要发展机器人?
n国家科技水平和国民经济现代化、信息化的重要标志;
n深入到各个领域:工农业、军事、航天、教育娱乐、社会服务、排险救灾…… ;
n提高工作效率、提高产品质量、减轻人的体力劳动;
l机器人干人不愿干的活
将人从有毒、有害、高温、危险的作业中解放出来。
l机器人干人干不好的活
机器人可以不知疲倦地重复工作
l机器人干人干不了的活
机器人可以下深海、上高空、入人体…
3.什么是机器人?
n具有一些类似人功能的(机械电子装置)自动化机器。
1.有类人功能,如动作能力、感知能力…...
2.根据人的编程自动工作;
3.它是人造的机器或机械电子装置。
n 目前,还没有统一的有关机器人的定义。一般认为:机器人是计算机控制的、可以编程的、能够完成某种工作或可以移动的自动化机械。
n 针对工业机器人的定义:机器人是一种用于移动各种材料、零件、工具或专用装置,通过可编程序动作来执行各种任务并具有编程能力的多功能机械手。
古代机器人
n 早在3000年前偃师就用木头制成了一个能歌善舞的“伶人”,(《列子·汤问》记载)这是最早记载的机器人,可以称得上是世界机器人的鼻祖。
n 春秋后期,鲁班发明了一只木鸟,能在空中飞行“三日不下”。
n 木牛流马

现代机器人的起源
n 1920年,捷克作家卡雷尔·卡佩克发表了科幻剧本 《罗萨姆的万能机器人》。剧本中把捷克语 “Robota”写成了“Robot”,被当成了机器人一词的起源。体现了人类长期以来的一种愿望:创造出一种机器代替人进行各种工作。
《罗萨姆的万能机器人》。剧本中把捷克语 “Robota”写成了“Robot”,被当成了机器人一词的起源。体现了人类长期以来的一种愿望:创造出一种机器代替人进行各种工作。
n1942年,美国作家埃萨克·阿西莫夫在科幻小说《I,Robot》首次使用了“Robotics”,即“机器人学”。阿西莫夫提出了“机器人三原则”:
① 机器人不应伤害人类,且在人类受到伤害时不可袖手旁观;
② 机器人应遵守人类的命令,与第一条违背的命令除外;
③ 机器人应能保护自己,与第一条相抵触者除外。
n机器人学术界一直将这三原则作为机器人开发的准则,阿西莫夫因此被称为“机器人学之父”。
n1947年在美国橡树岭国家实验室研制成功第一台主从遥控机器人,用于核原料的处理。
n1954年:美国人戴沃尔制造出世界上第一台可编程机械手,并注册了专利。
n1959年:戴沃尔与美国发明家英格伯格(Ingerborg)联手制造出第一台工业机器人,随后成立了世界上第一家机器人制造工厂——Unimation公司。英格伯格被称为“工业机器人之父”。
n1962年:美国AMF公司生产出万能搬运(Verstran)机器人,与Unimation公司生产的万能伙伴(Unimate)机器人一样成为真正商业化的工业机器人,掀起了全世界对机器人研究的热潮。同时,美国研制成功PUMA(Programmable Universal Manipulator for Assembly)通用示教编程机器人。标志着机器人走向成熟。
n 相继英国人也研制成功…

n60年代末期,日本购买了美国机器人专利,研究和开发机器人。
n70年代,日本等国将机器人用于汽车工业,机器人走向应用。
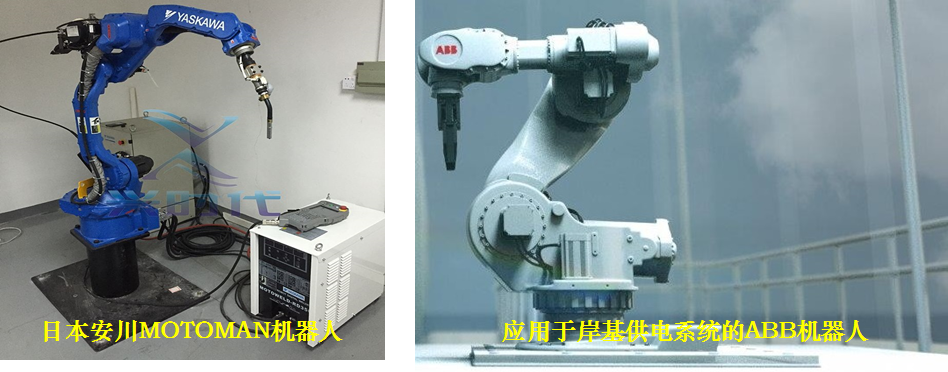
n70年代后期80年代初,工业机器人变成商品,得到普遍应用,并开始研究具有感知的第二代机器人。出现瑞典ABB机器人公司、德国KUKA机器人公司、日本MOTOMAN机器人公司和FUNAC机器人公司。
n不断扩展机器人的应用领域······