-
1 内容目标
-
2 视频:数据库
-
3 课前小练
任务内容:数据库的认知,程序的创建
【实践内容】:
(1)在基座标水平面内,利用修改数据库的方法,实现示教点位的精准偏移取点方法。
【题1】: 让J1, J2, J3, J4, J5, J6,旋转到(0,90,130,45,0,0)处,然后取点让机器人6个轴分别相对刚才的位置旋转(20,20,20,20,20,20)。
【题2】:在桌面上取点存为P1点,相对于P1点,分别朝X轴、Y轴正负方向偏移10cm取点,Z轴正方向向上偏移10cm取点并储存。(根据机器人的型号不同可以灵活改变偏移尺寸)
(2)学会程序创建的方法,熟悉程序的基本架构,熟悉MOVE指令的应用方法。
【题1】:测试 “Move P, @0, P(1), 100”、“Move L, @0, P(1), 100”“Move L, @P, P(1), 100”、“Move L, @0, P(1), 50”“Move C, @0, P(1), P(2), 50”这些指令的区别与联系。
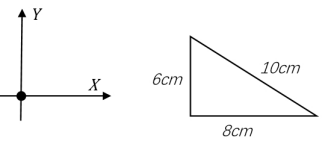
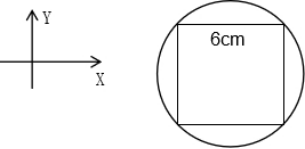
(3)结合数据库的修改和程序的编制方法,在Work0坐标系下,在桌面上完成规定图形的绘制。
【基础练习题】:(可以更改在不同的平面坐标系下完成下面图形,也可以在同一坐标系下更改图形方向。)
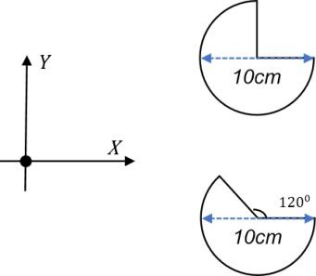
【提高练习题】:(可以更改在图形的尺寸,也可以在同一坐标系下更改图形方向。)

(4)掌握工业机器人原点校正的方法并实践操作。
【注意事项】:
(1)安全第一,预防为主为原则
(2)手动示教时,外部速度勿超5%。
(3)当示教机器人时,机器人活动区域内切勿站人。
(4)当数据库数据改变时,要注意修改后的数据不能超出机器人的活动范围。
任务目标:数据库的认知,程序的创建
【知识技能目标】:
1. 掌握工业机器人数据库的基本概念。学会正确调用数据库,修改数据库的数据。
2. 掌握FOXBOT工业机器人的程序创建的方法。
3. 熟练掌握Move指令的功能,并能熟练应用进行编程。
4. 进一步熟悉直角坐标系的概念,对机器人工作方向有明确的认知。
5. 掌握原点校正的方法。
【素养目标】:
1. 培养安全操作意识和良好的职业素养。
2. 通过机器人实训的初步认知,激发学习兴趣,为后续的学习奠定基础。
3. 培养查找文献和各类资源、获取信息并利用信息的能力,获取信息和评估、分析并能合理利用和支配运用于课程学习。
4. 培养良好的团队协作能力,正确处理人际关系的能力。虚心求教,班集体成员共同进步。

