
任务:为一个虚拟机器人进化出一套控制程序

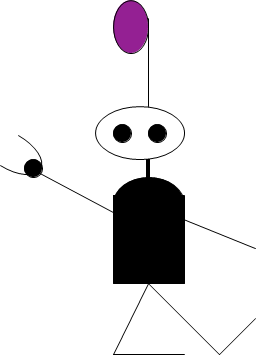
Herbert Robby
The Soda Can Collecting Robot The Virtual Soda Can Collecting Robot
(Connell, Brooks, Ning, 1988) (Mitchell, 2009)
Robby的世界是个10X10的方格棋盘,周围是墙,格子上面放着一些易拉罐。
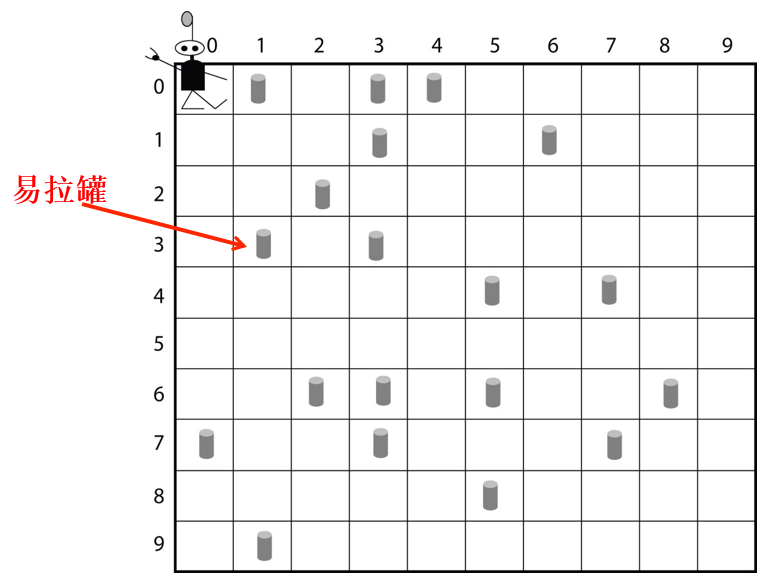
Robby能看到的东西(输入):所在格子和上下左右四个格子(空,墙,易拉罐)
Robby能做的动作(输出):向上移动、向下移动、向左移动、向右移动、随机移动、原地不动、捡易拉罐
Robby得到的回报(评价):捡起易拉罐=10、撞墙=-5、捡空了=-1
目标:使用遗传算法为Robby生成控制程序(策略)
策略:一组规则,指明在所有情况下应当采取的行动。
情形:对于Robby来说,就是他看到的五个格子的内容。在Robby的世界,他会遇到的情形理论上总共有3*3*3*3*3=243种,当然有些情形实际上不存在,比如站在墙上或者左右都是墙。
下面这个表就是一个策略:
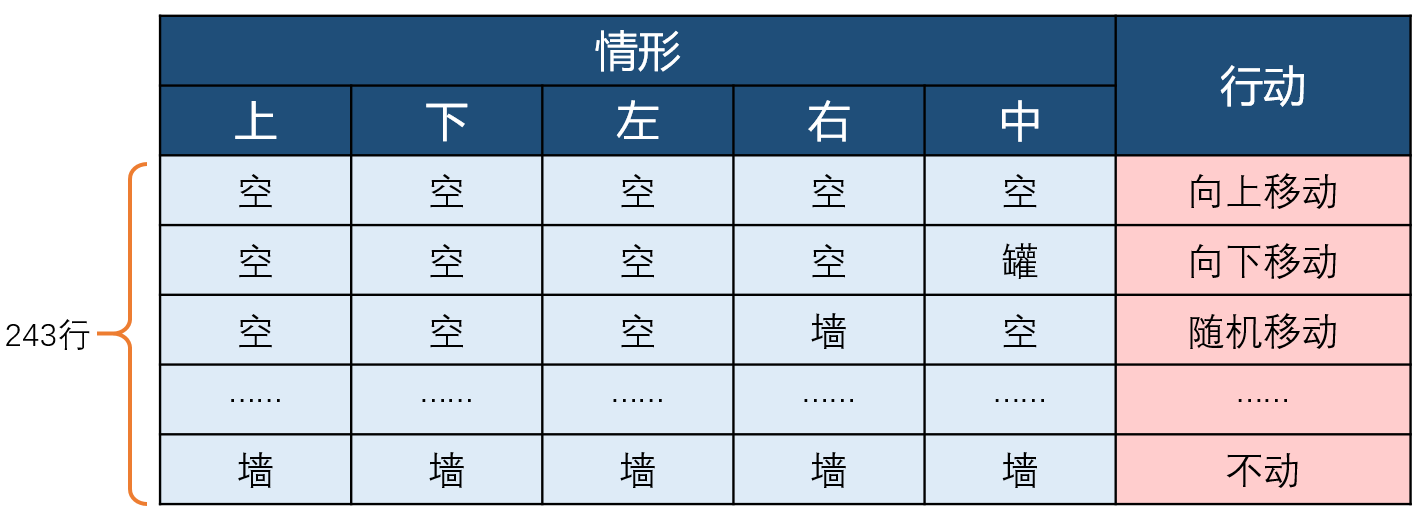
用表来表述策略太麻烦,计算机也不容易识别,因此我们对策略进行编码(Encoding):
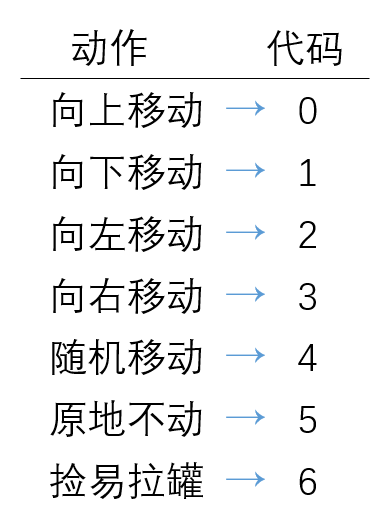
首先对行动进行编码:
然后对情形进行编码:将243种情形的顺序确定,然后以其行号为代码。
最后将策略表的左右两侧用代码替代,并将其转置为一串字符,情形代码为字符串的索引,动作代码为字符串上各个位的字符:
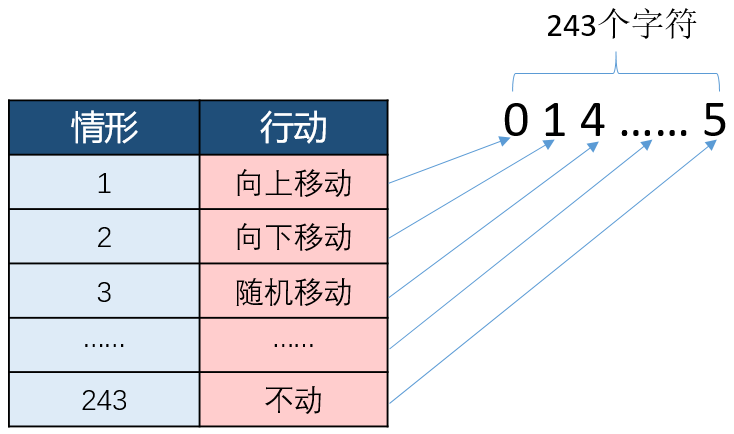
我们可以说Robby的策略有243个基因。那么Robby总共有多少种策略呢?7*7*7*....*7
GA的目标就是在这浩如烟海的可能性中搜寻好的策略。
搜寻好策略的过程是嵌套的迭代:

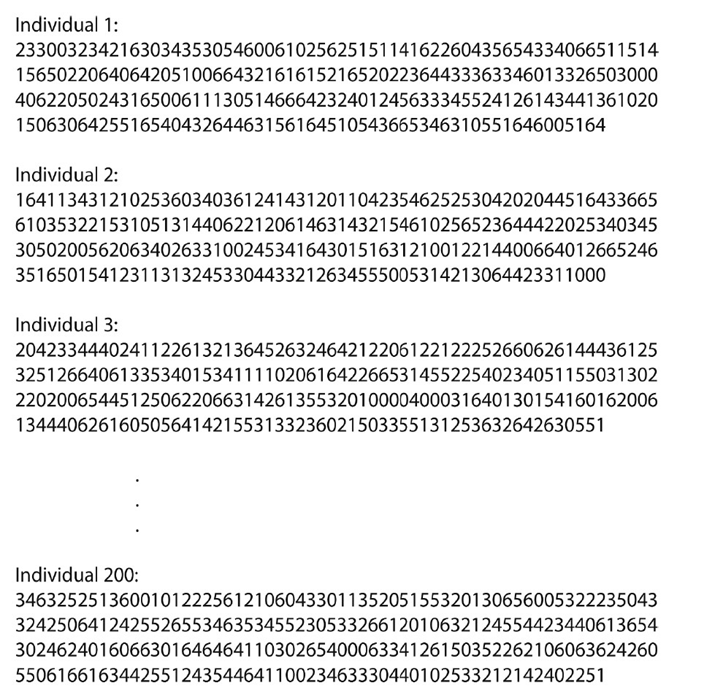
1.生成初始群体,群体内有200个随机个体,也就是200个策略。重复以下步骤1000次。
2.计算群体中每个个体的适应度(回报,得分)。
1.让Robby执行100次不同的清扫任务(约50个罐子随机放置)。
2.规定Robby在每次任务中只进行200个动作。
3.每次任务的得分就是这200个动作得分的和。
4.该策略的适应度就是这100次任务得分的平均值。
3.进化,产生新一代个体,共200个。
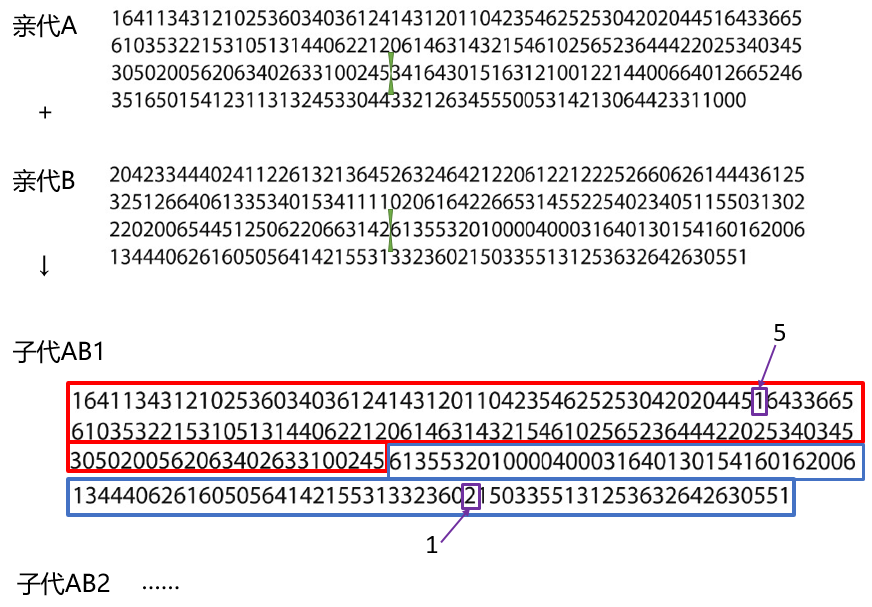
1.根据适应度随机选择出一对个体作为亲代,策略的适应度越高,被选中的概率越大。
2.亲代交配产生两个子代个体。(亲代基因截断互换,成为子代基因)
3.子代基因以很小的概率产生随机变异。
4.进行迭代。
每一个群体里的个体策略,看起来是这样的:
而亲代通过交配繁殖下一代的原理是基因交换:
我们在Netlogo中实现这个过程:RobbyGA.nlogo(下载附件 36.49 KB)
遗传算法 VS 人的智慧
根据上面的设定,策略的最大可能适应度大约为500。
我们想出一个自认为很“智慧”的策略:
如果当前位置有罐子就捡起来
否则,向旁边有罐子的格子移动
如果旁边有几个罐子,则事先设定好向哪个移动
如果都没有罐子,则随机移动。
用10000个清扫任务测试这个策略,结果平均得分约346。对于GA,取刚才运行的最后一代之中适应度最高的策略,用10000个任务测试,得分约486。
结果:GA 完爆人的智慧,并且几乎接近最优策略......这就很尴尬了。

