-
1 课堂内容
-
2 随堂练习
1. ①自动驾驶仪的组成
自动驾驶仪由敏感元件(传感器)、变换放大元件和执行元件三大部分组成,另外还有一些辅助装置,如能源(电源、气源或液压源)等。
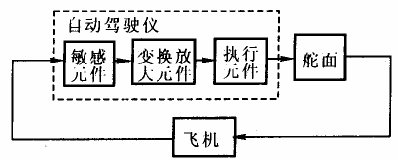
敏感元件(传感器):测量飞行的状态参数;
变换放大元件:参数的综合放大和处理;
执行元件:发出功率,按参数要求操纵舵面偏转。
自动驾驶还需满足两个条件:
⑴ 应能l判别出飞机偏离预定姿态的情况,并按偏离方向使舵面作相应方向的偏转;
⑵l 使舵面偏转的大小与飞机偏离的大小成一定的比例关系。
自动驾驶仪能稳定或改变飞机的飞行姿态,广泛应用于各类飞机上。
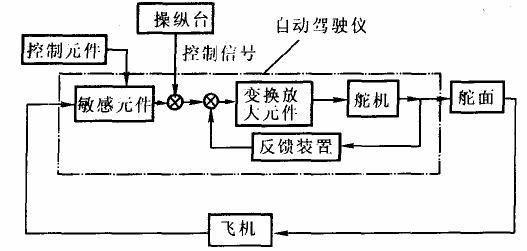
2. 自动驾驶仪的功用
按照驾驶员的意图稳定飞机飞行状态。
执行来自驾驶仪操纵台的各种指令信号。
l与其他装置配合后,可自动执行一定的飞行任务。
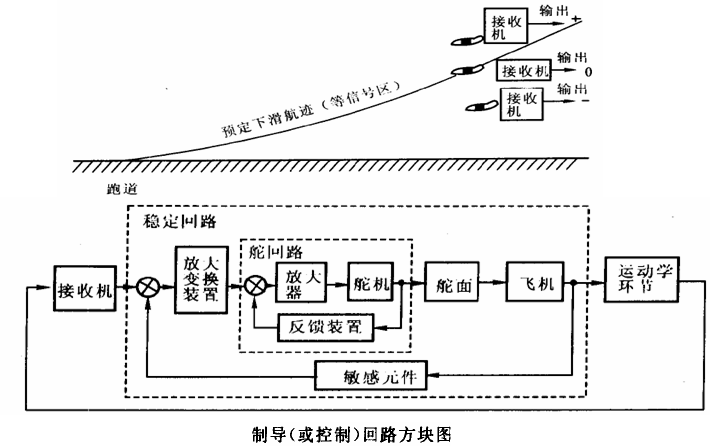
3. 自动驾驶仪的工作原理
飞机有升降舵、方向舵和副翼三个主要操纵面,因此,自动驾驶仪(三轴自动驾驶仪)也有相应的纵向、航向和横向三个通道来控制相应的操纵面,且航向和横向通道间常有信号交联。驾驶仪与飞机组成一个闭环系统,称为飞机-驾驶仪系统,是一种自动飞行控制系统。在每个通道内都要有一个姿态角反馈信号,也可以有其他反馈信号(如用于改进系统性能的角速度、角加速度和高度信号等)。
⑴ 驾驶仪n处于稳定姿态时的情况
此时只关心稳定状态,因此认为操纵台来的指令信号为零或某一常数,且飞机以预定的零俯仰角或某个数值等速平飞。
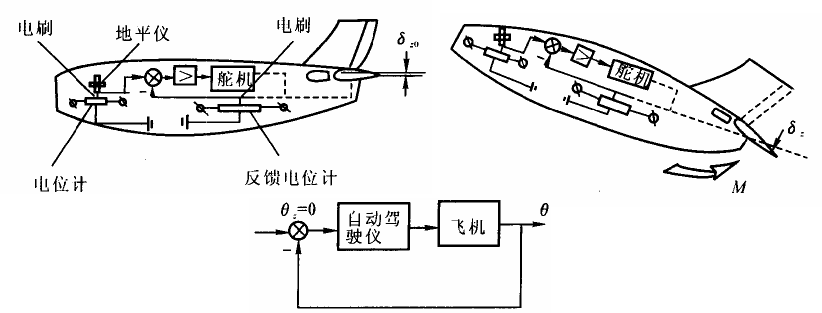
当飞机正常飞行时,敏感元件地平仪无信号输出,升降舵处于某个起始平衡位置。当有扰动使飞机抬头偏离原飞行姿态时,这种变化被地平仪检测到,并输出相应的电信号,通过舵机使升降舵向下偏转一个角度,由此产生一个低头力矩,使飞机逐渐返回原姿态。
同时,反馈电位计中的电刷由舵机带动产生一个负反馈信号,可与地平仪的飞行姿态的偏差信号进行迭加,由于二者的极性相反,因此起到了削弱控制信号的作用,使升降舵逐渐收回,飞机平稳返回原飞行姿态。
另外,驾驶仪还可对预定的高度、速度进行稳定。航向和横向通道的工作原理与上述原理基本相同。
⑵ 驾驶仪处于执行控制命令的情况
⑶ 驾驶仪与其他装置配合时的情况