机构演化与变异
1.机构的演化:以某机构为原始机构,对组成机构的各元素(运动副,构件)进行各种性质的改变或变换,而形成一种功能不同的机构。
2.各种性质的改变或变换:机构各元素形状和尺寸上的改变,运动形式的变换,运动等效变换,组成原理的仿效。
3.机构演化与变异的主要方法:运动副及构件形状尺寸的改变,机架变换,机构的等效变换,机构结构的仿效。
4.变异机构:通过演化与变异而获得新功能的机构
机构的机架变换与创新设计
机构的机架变换称作机构的倒置,机架变换后,机构内各构件的相对运动关系不变,但绝对运动发生了改变。
2.1.1 平面四杆机构的机架变换
1.铰链四杆机构的机架变化

曲柄摇杆机构:具有急回运动特征
双曲柄机构:例如平行四边形机构
双摇杆机构:例如等腰梯形机构,车辆转向。
2.1.2齿轮机构及挠性件传动机构的机架变换
普通齿轮传动机构→行星齿轮机构
普通链传动或齿形带传动→行星传动机构
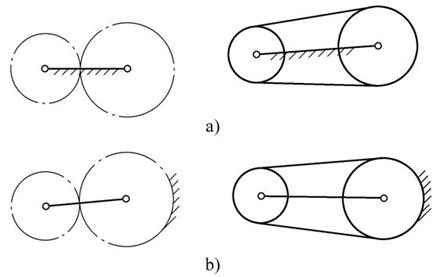
注意:挠性传动机构只有具有啮合性质的链传动或齿形带传动才能进行这种变换。各种履带运输车辆的行走机构就可看成是将链传动机构倒置而设计制成的。另外,将链传动中的链固定成为机架,可代替造价昂贵的齿轮齿条机构。
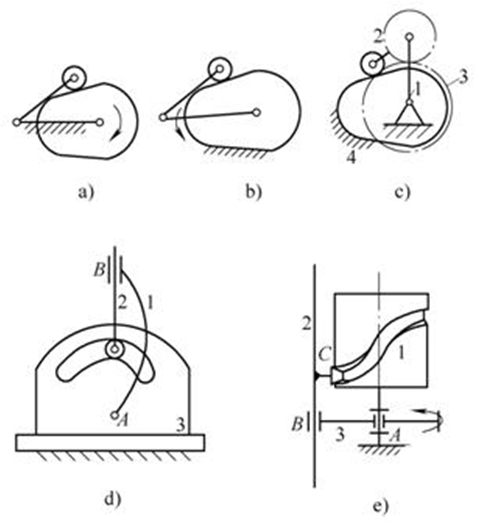
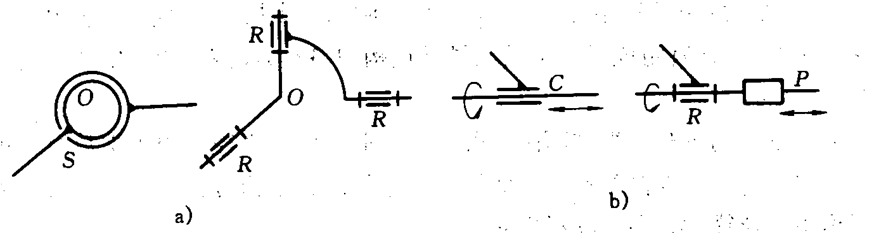
2.1.3凸轮机构的机架变换
普通凸轮机构 图 a)
固定凸轮机构:凸轮固定,从动件作复合运动。图 b)
应用举例:图 c) 凸轮-行星机构
图 d) e)
机构的运动副演化与变异
1.主要目的:
(1)增强运动副元素的接触强度
(2)减小运动副元素的摩擦、磨损
(3)改变机构的受力状态
(4)改善机构的运动和动力效果
(5)开拓机构的各种新功能
(6)寻求演化新机构的有效途径
2.主要方法:
(1)改变运动副的尺寸
(2)改变运动副的接触性质
(3)改变运动副的形状
2.2.1 运动副的尺寸变换
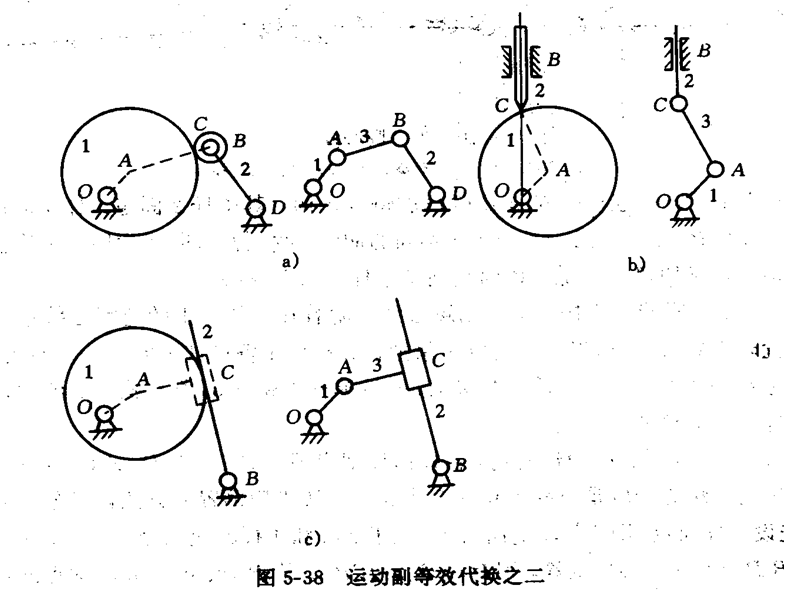
2.3 运动副的等效代换与创新设计
运动副的等效代换是指组成机构的各种运动副相互转换或替代,而又不改变机构运动的输入相输出特性,这些特性主要指机构的自由度、机构中各相应构件的运动特征等。
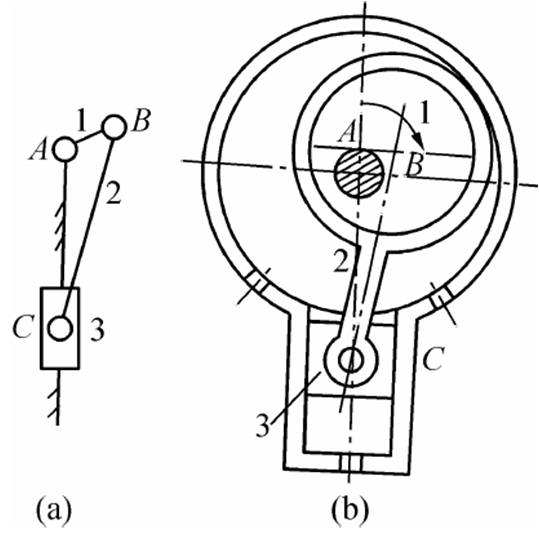
2.3.1 空间运动副与平面运动副的等效代换
(1)球面副与转动副的等效代换
(2)圆柱副与转动副加移动副的等效代换
2.3.1 空间运动副与平面运动副的等效代换
2.3.2 高副与低副的等效代换