
任务2 工业机器人的运行调试
-
1 任务导学
-
2 教学视频
-
3 学习课件
上一节
下一节
| 任务导学 | |
| 任务名称 | 工业机器人的运行调试 |
| 任务描述 | |
| 智能制造系统中代替人实现物料在各设备之间传送的装置是工业机器人。观看活塞加工智能制造系统工作过程(案例),其中工业机器人需要执行的任务为上料、下料以及物料信息读写搬运、检测搬运和入库搬运。本次学习任务要求控制工业机器人将工件(毛坯)搬运到数控加工中心加工(上料),待数控加工中心加工完成后,将工件(成品)搬运到物料信息读写区(信息读写搬运),待读写完成后,将工件(成品)托盘搬运至缓冲区待检测(检测搬运),待智能检测单元检测完成后,又从缓冲区将工件(成品(合格或不合格))托盘搬运至物料信息读写区(信息读写搬运),待读写信息完成后,最后将工件(成品(合格或不合格))托盘搬运到缓冲区待智能仓库单元工作(入库搬运)。 | |
| 任务书 | |
在活塞加工智能制造系统中,用库卡机器人搬运物料。机器人工作站主要由机器人台体、搬运机器人、机器人快换夹具、信息读写台及电气控制系统等组成,主要用于工件的搬运、托盘信息读写、机器人夹具更换。要求你完成机器人 KRC4 安全配置和正确的 I/O 地址配置,以实现机器人的正常操作。在活塞加工智能制造系统中,要求你完成从工件的上料、下料、信息读写搬运、检测搬运和入库搬运等工作。工业机器人站、信息读写台、夹具快换装置、数控加工中心工装夹具、缓冲区、中转检测台如图11-1 所示。 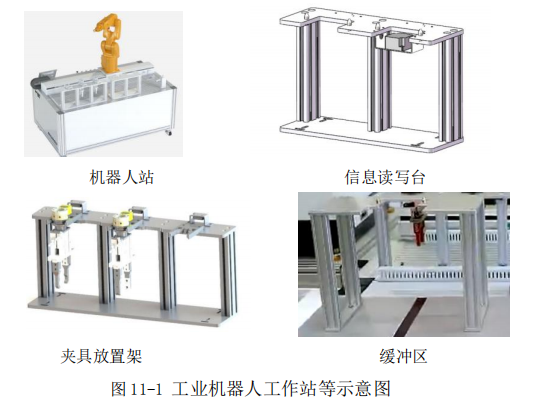 | |
| 学习目标 | |
1.主要内容 ①采用 WorkVisual 软件完成I/O 地址配置; ②工业机器人搬运程序的编写; ③工业机器人物料搬运调试运行。 2.学习目标 知识 ①掌握工业机器人编程思路及技巧, ②掌握程序流程图的绘制方法,工业机器人程序设计、编写、调试和优化方法及技巧; ③掌握工业机器人与外部设备通讯调试方法。 能力 ①根据物料搬运要求,完成工业机器人控制程序的编写; ②根据任务要求,完成工业机器人路径规划与设计; ③根据生产要求,完成工业机器人搬运调试。 素质 ①了解国内外工业机器人编程软件和操作系统的区别,使学生认识到自主研发操作系统、软件开发的重要性; ②使学生懂得程序编制的规范,养成严谨、认真的职业素养。 | |

