
第五节 光学系统外形尺寸的计算
上一节
下一节
§6.5光学系统外形尺寸的计算
u第一阶段为初步设计阶段,通常叫外形尺寸计算
u第二阶段为像差设计阶段
u光学系统外形尺寸计算的任务是根据对仪器提出的要求,如光学特性,外形,重量以及有关技术条件等,确定系统的组成,各组员的焦距,各组员的相对位置和横向尺寸等
u光学系统像差计算的任务是根据第一阶段的设计结果,通过光路计算,运用像差理论和自动设计方法,确定系统的结构参数,如曲率半径,厚度以及所用的材料等等,使系统的成象质量满足使用要求
一系统的要求
1.系统的光学性能和技术条件
2.系统的外形、体积
3.系统的稳定性,牢固性,和可调整性
4.对系统成像质量的要求
二 光学系统外形尺寸计算的主要内容
1. 根据上述光学特性和外形、提及的要求,拟定光学系统的结构原理图
2. 确定每个透镜组的光学参数,如焦距,相对孔径,视场角等。同时确定各个透镜组的相互间隔
3. 选择系统成像光束位置,并计算每个透镜的通光口径
4. 根据成像质量和光学特性的要求,选定系统中每个透镜组的型式
注:在初步设计中不考虑像差,完全根据理想光学系统公式进行计算
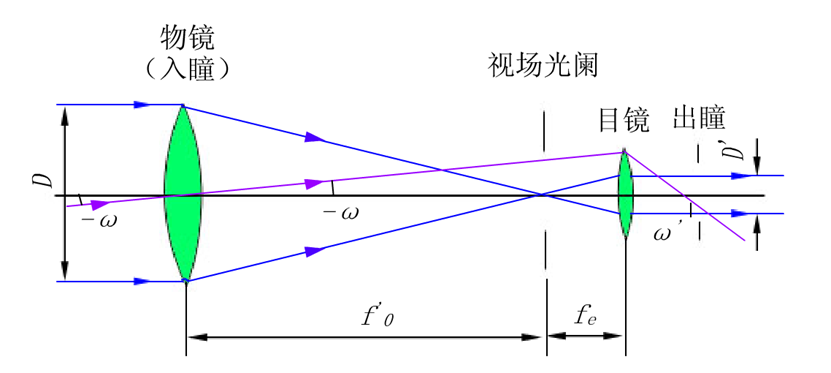
三 以简单望远镜为例
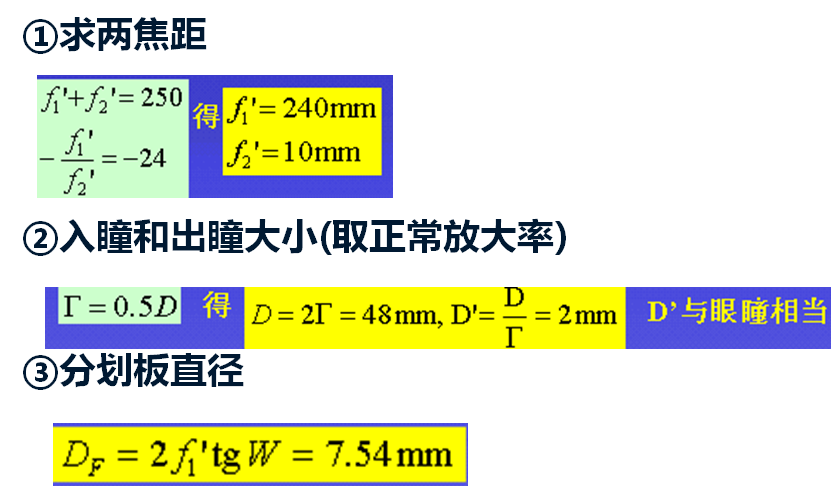
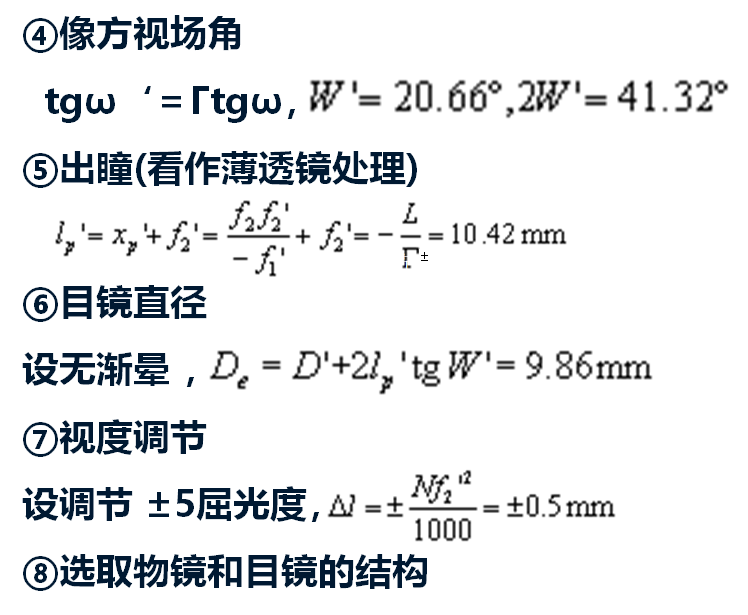
设计一个简单开普勒望远系统的外形尺寸。该系统只包括物镜和目镜,要求镜筒长度L=250mm,放大率Γ=-24×,视场角2ω=1º40’

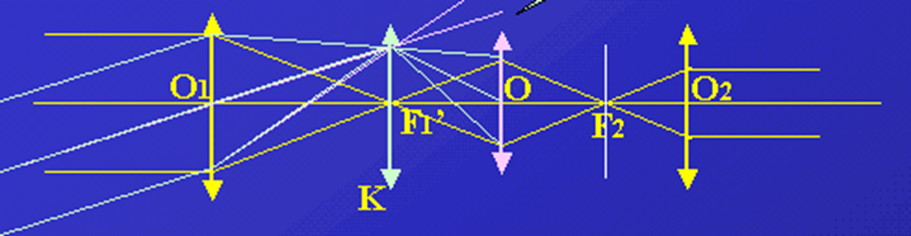
2. 透镜转像系统:在物镜的实像平面后面,使倒像再一次倒转成为正像的透镜系统。有单组和双组两种形式。
适用于筒长较长时
单组透镜转像系统,对于-1倍单组转像透镜,筒长加长了4倍转像透镜的焦距
u双组透镜转像系统,筒长加长更多
如果两个转像透镜焦距相等,距离为d,则筒长增加了
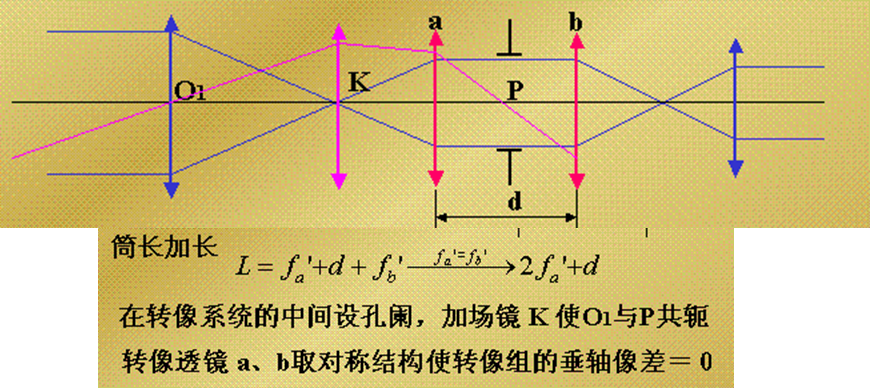
u若加入单组透镜转向系统,应如何计算?
u加入棱镜或双组透镜转像系统呢?

