
§5.1 像差概述
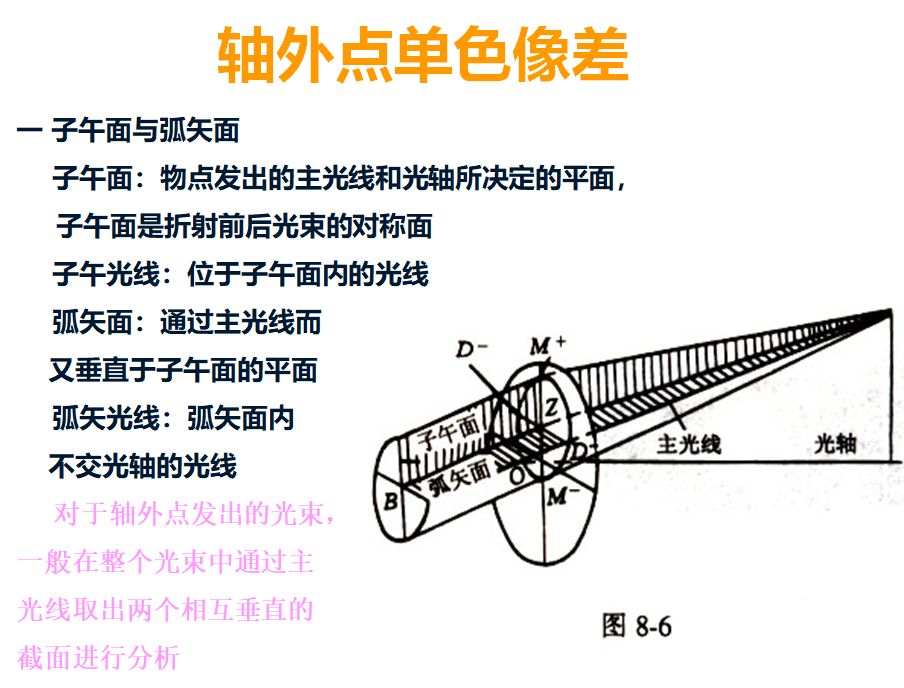
一、像差 Aberration
①以前研究的都是理想像,在傍轴条件下理想成像是能近似实现的,近轴条件要求成像光束的孔径小和仪器的视场小
②对任何一个实际的光学系统而言,都需要一定的相对孔径和视场(如显微镜 )
③像差-实际像与理想象之间的偏差
④光学系统设计的一项重要工作就是要校正这些像差,使成像质量达到技术要求

对于成像光学系统,像差是极其有害的,而没有像差的光学系统是不存在的
像差的消除是个非常大而困难的问题,完全消除也不可能
把像差校正到某一公差范围内
了解各种像差的现象、产生原因、光束结构、减小像差的措施
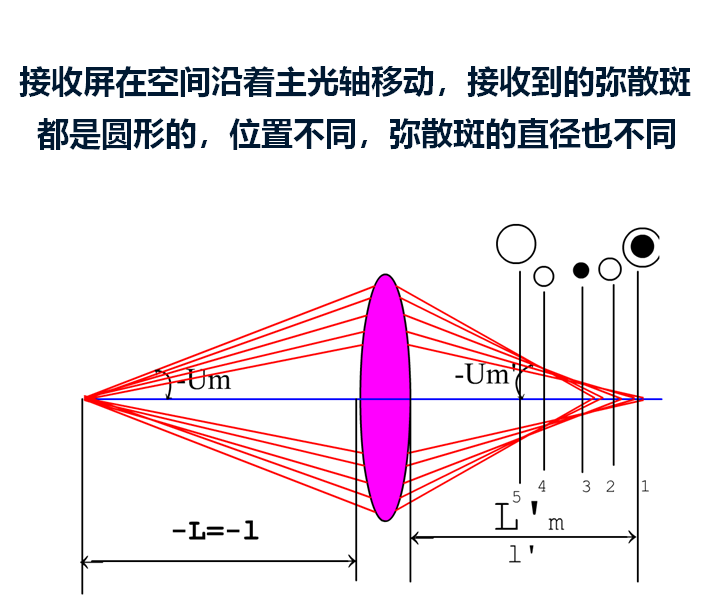
球差(轴上点单色像差Monochromatic)

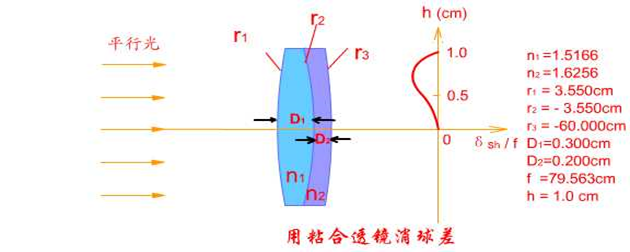
2.组合(正负透镜的组合,组合方式:胶合或分离)
用配曲法不可能将一个透镜的球差完全消除。凸透镜的球差是负的,凹透镜的球差是正的。把凸、凹两个透镜粘合起来,组成一个复合透镜,可使某个高度h上的球差完全抵消。
u说明:
不论采取什么措施,多复杂的系统,一般都只能对某一非近轴环节消球差,而不能同时对各种孔径角的环节消球差。总有一定的剩余球差,主要包括:
①其它环带的问题
②高阶球差问题
三.分类
u球差:轴外子午球差、轴外弧矢球差
u彗差:子午彗差、弧矢彗差
u象散
u场曲:子午场曲、弧矢场曲
u畸变
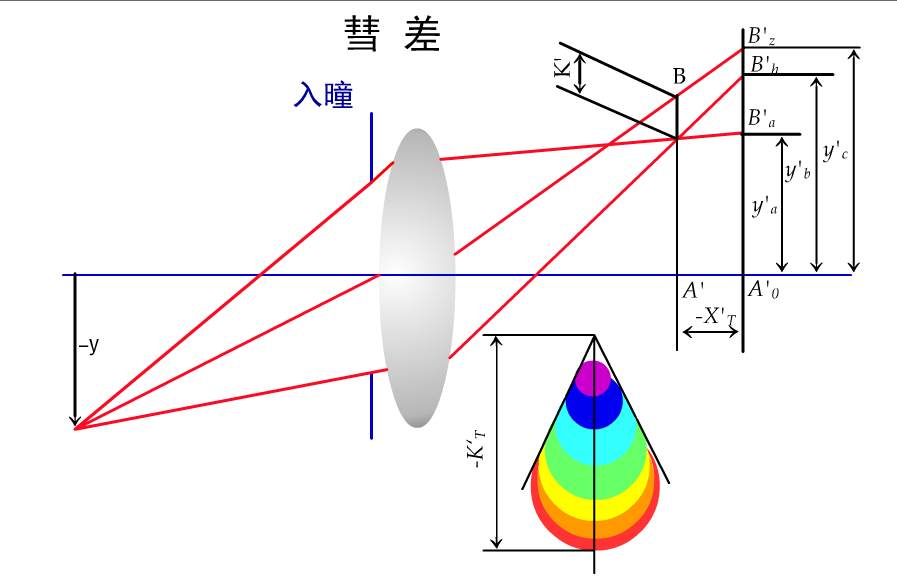
四.彗差coma(粗光束)
什么是彗差?:轴外物点发出的粗光束,经系统后所成的像对主光线失去对称的一种像差
子午彗差:上下光线经系统后的交点BT’对主光线的垂直于光轴方向的偏离,KT’
子午光线的结构特点:
u子午面光线经系统成像仍在子午面内u由于系统像差的存在, 对称于主光线两侧的”子午光线对”, 经系统后,交点不在主光线上,也不交在理想像面上
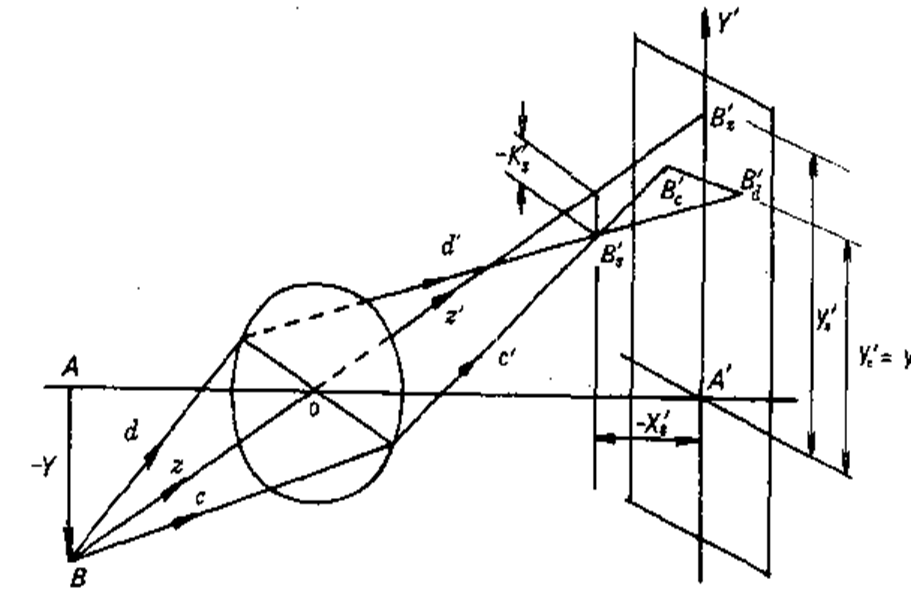
弧矢彗差:前后光线经系统后的交点BS’到主光线的垂直于光轴方向的距离,KS’
弧矢面光线的结构特点
u由于系统像差的存在,对称于主光线两侧的”弧矢光线对”,经系统后交点必然在子午面上,但不在主光线上,也不在理想像面上
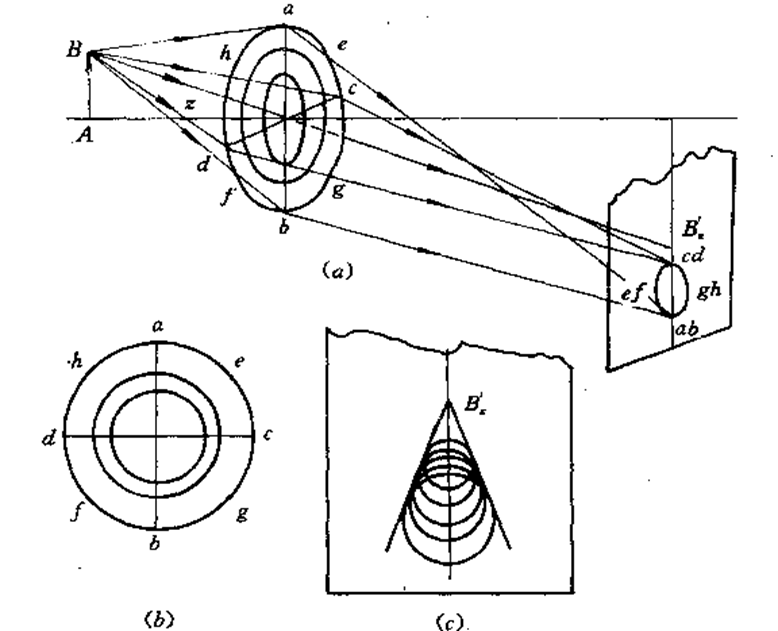
正彗差:彗星头朝向光轴
负彗差:彗星尾巴朝向光轴
彗差图形
2.讨论
u物点离光轴越远,彗差越大
u对给定的离轴物点,成像光束愈大,彗差愈大
u与透镜的形状和物点的轴向位置有关
3.消除方法
u满足阿贝正弦条件的光学系统无彗差
u配曲,适当选取透镜的曲率半径(形状)和位置因子
u采用正负透镜的胶合,能同时校正球差和彗差
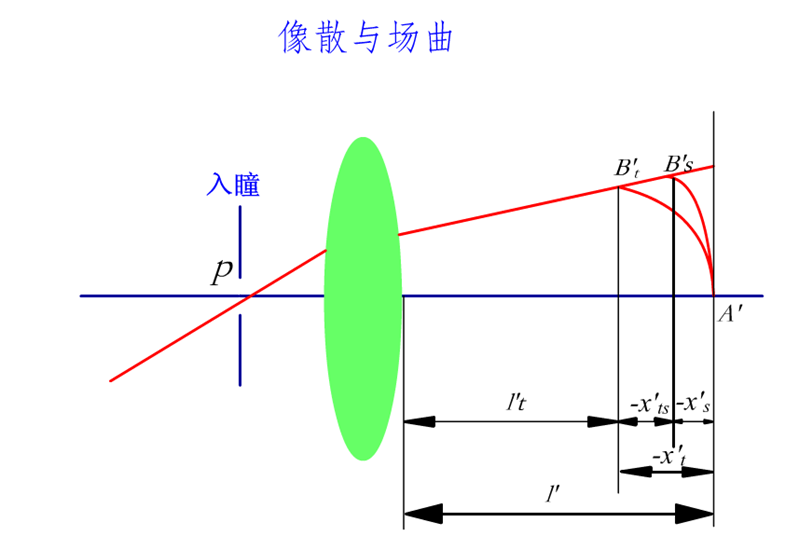
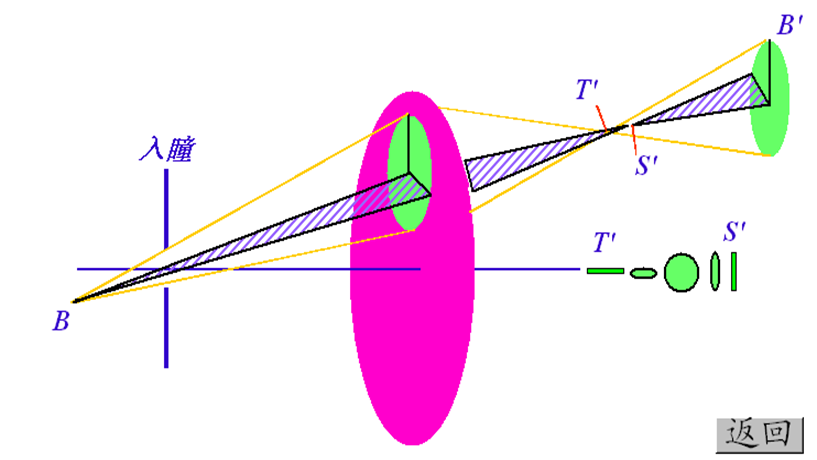
五 象散Astigmation
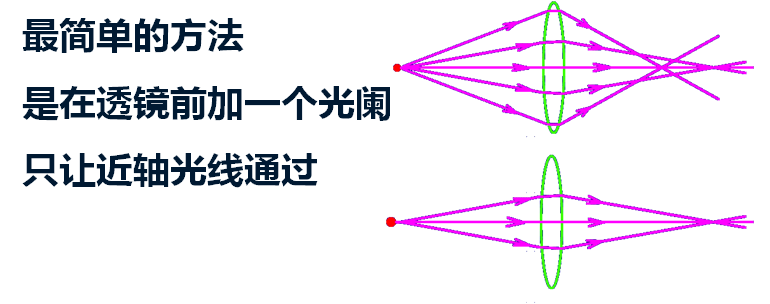
若把光阑缩到无限小,只允许沿主光线的无限细光束通过,则彗差不存在,但是有细光束的像散和场曲存在
1.什么是象散?
u光束的子午像点和弧矢像点不重合,两者分开的距离称为象散
u宽光束像散
u细光束像散
u象散的大小随物体离开光轴的高低不同而不同
u由于对称性,象散曲面为一旋转抛物面
2.象散与哪些因素有关?
u与远光束相对于光轴的倾角有关
u与f’、n’有关
3。消除象散的方法
正负透镜象散相反,胶合后可消除
合理确定光阑位置,使T和S两个抛物面重合为一个抛物面P,这个面称为Pettzval曲面,可得点像
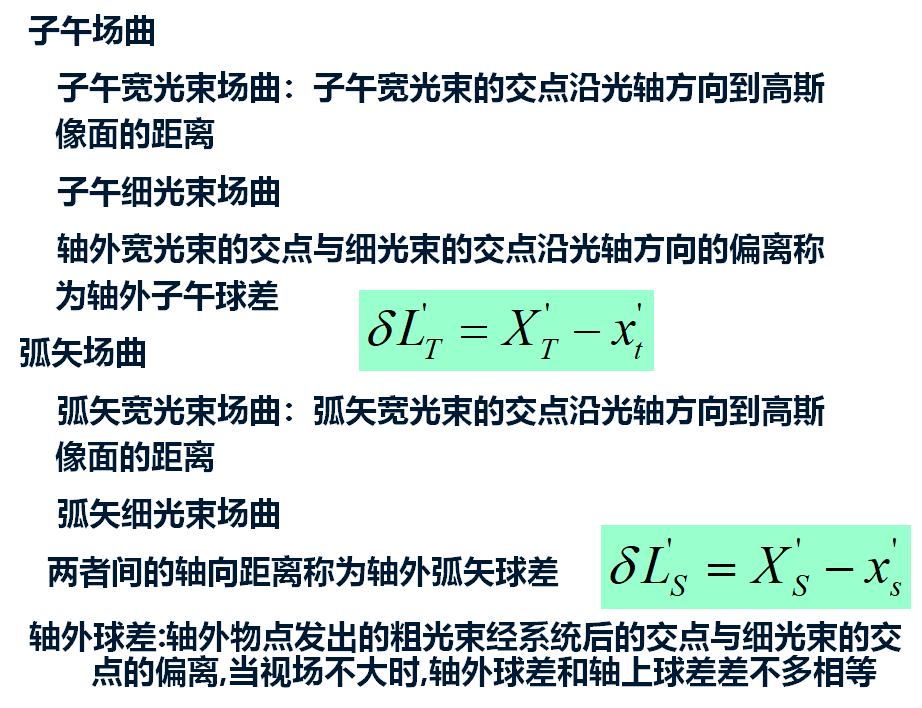
六场曲 Curvature of field
1.定义
u当一个系统象散完全消除时,即处于Pettzval曲面状态时,垂直于光轴的平面仍然不能为平面,则称这种像场弯曲为场曲
u像场弯曲的效果是不论像面在任何平面位置,像总是一部分清晰,一部分不清晰
2.影响因素
u与焦面位置和物体高度有关u与n有关u与光阑位置有关
3.消除方法
u加光阑,可以减小单透镜场曲
例:照相物镜在负弯月透镜前加光阑
u组合系统,复杂化系统,适当选择焦距和nu将探测器面弯曲以适应场曲
例:大幅航空相机
七畸变Distortion
以上几种像差的共同特点是:像点被弥散斑所代替,破坏了像的清晰程度。
畸变并不影响像的清晰程度,但影响像和物的几何相似性
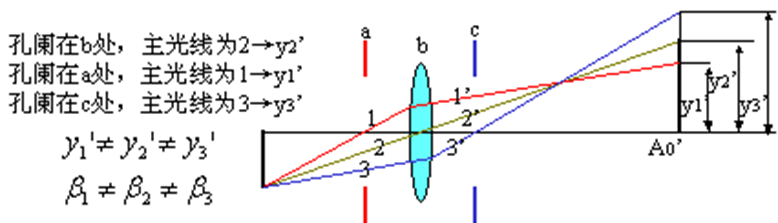
当孔阑位置移动,球差的影响,不同视场的主光线与高斯像面交点高度不等于理想像高,其差别就是系统的畸变
1.畸变
u畸变仅是像的变形,不影响像的清晰度。
u有些光学系统只对清晰度要求高,对变形的要求可以降低
2.产生原因
u光学系统对共轭面上不同高度的物体有不同垂轴放大率所致。β不是常数,而是物高y的函数
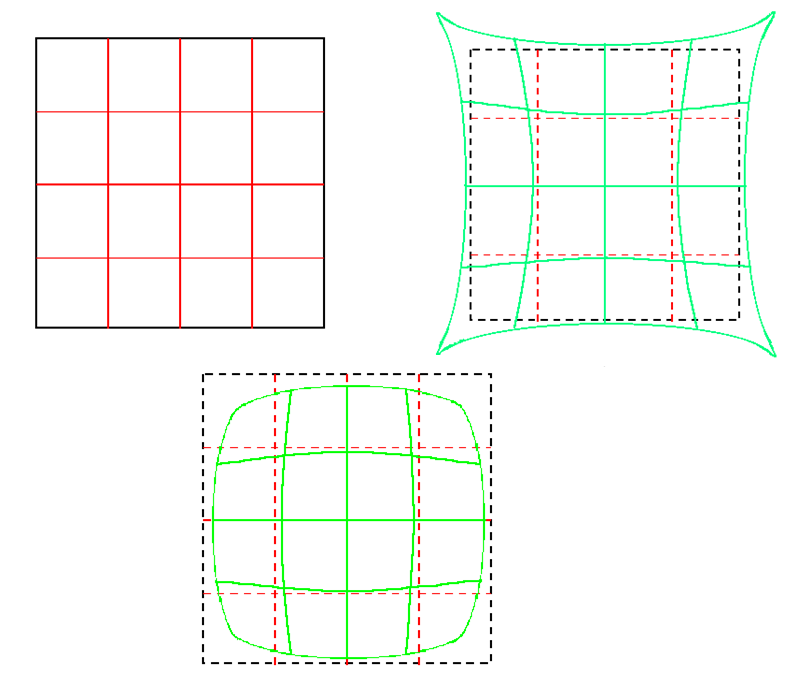
3.分类
u桶形畸变(负畸变),β随物高y的增大而减小
u枕形畸变(正畸变)
4.影响因素及清除方法
u光阑对畸变的影响
u当孔径光阑中心与薄透镜中心重合时无畸变
u入瞳与主平面重合系统无畸变

