概述
机器人是“制造业皇冠顶端的明珠”,其研发、制造和应用是衡量一个国家科技创新和高端制造业水平的重要标志。 “机器人革命” 有望成为“第四次工业革命” 的切入点和增长点。本书将着重讨论工业机器人的结构、控制和应用等问题,希望读者通过对课程的学习, 能够对工业机器人的基本知识有一个较全面的了解和掌握。
1.1机器人概述
“机器人(robot)”作为专有名词进入人们的视野已经将近100 年。1920 年捷克作家Karel Capek 编写了一部科幻剧《Rossums Universal Robots》。该剧中描述了一家公司发明并制造了一大批能听命于人,能劳动且形状像人的机器。这些机器在初期阶段能按照其主人的指令工作, 没有感觉和感情, 只能以呆板的方式从事繁重的、不公正的劳动。后来的研究使这些机器有了感情,进而导致它们发动了反对主人的暴乱。剧中的人造机器取名为robota (捷克语, 意为农奴、苦力), robot 是由其衍生而来的。
随着科技的发展,20 世纪60 年代出现了可实用的机器人, 机器人逐渐从科幻世界走进现实世界, 进入到人们的生产与生活当中。但是,现实生活中的机器人并不像科幻世界中的机器人那样具有完全自主性、智能性和自我繁殖能力。那么, 现实中是怎么定义机器人的呢?
到目前为止,国际上还没有对机器人做出明确统一的定义。根据各个国家对机器人的定义, 总结各种说法的共同之处, 机器人应该具有以下特性:
1)一种机械电子装置。
2)动作具有类似于人或其他生物体的功能。
3)可通过编程执行多种工作, 具有一定的通用性和灵活性。
4)具有一定程度的智能, 能够自主地完成一些操作。
1940年, 一位名叫Jsaac Asimov 的科幻作家首次使用了 Robotics (机器人学) 来描述与机器人相关的科学, 并提出了“机器人学三原则”。这三条原则如下:
1)机器人不得伤害人或由于故障而使人遭受不幸。
2)机器人必须服从于人的指令, 除非这些指令与第一原则相矛盾。
3)机器人必须能保护自己的生存, 只要这种保护行为不与第一或第二原则相矛盾。
这三条原则给机器人社会赋予了新的伦理性,并使机器人概念通俗化, 更易于为人类社会所接受。至今, 它仍为机器人研究人员、设计制造厂商和用户, 提供了十分有意义的指导方针。
机器人的大量应用是从工业生产的搬运、喷涂、焊接等方面开始的,目的是希望能够将人类从繁重的、重复单调的、危险的生产作业中解放出来。随着机器人技术的不断发展,机器人应用领域也在不断扩展。如今机器人已经逐渐进入人们生产与生活的方方面面。除了工业机器人得到广泛应用外,医疗机器人、家政服务机器人、救援机器人、娱乐机器人等也得到了长足发展。另外, 除了在民用领域,军事领域也在广泛使用机器人。各发达国家研发了许多海、陆、空战用机器人, 以显示军事现代化的实力。进入21世纪以来, 机器人的应用已经随处可见, 它正在影响和改变着人们的生产与生活。
1.2 机器人的发展历程
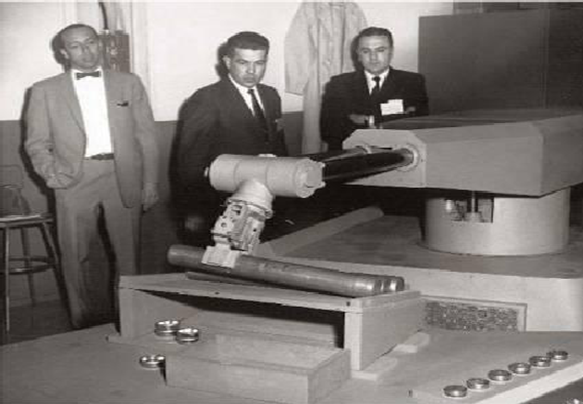
世界上第一台机器人于20世纪50 年代诞生于美国, 虽然它是一台试验的样机, 但是它体现了现代工业广泛应用的机器人的主要特征。因此,它的诞生标志着机器人从科幻世界进入到现实生活。20 世纪60 年代初, 工业机器人产品问世。然而, 在工业机器人问世后的最初十年, 机器人技术的发展较为缓慢,主要停留在大学和研究所的实验室里。虽然在这一阶段也取得了一些研究成果, 但是没有形成生产力, 且应用较少。代表性的机器人有美国Unimation公司的Unimate 机器人和美国AMF 公司的Versatran 机器人等。
美国造出了世界上第一台工业机器人Unimate
20世纪70 年代, 随着人工智能、自动控制理论、电子计算机等技术的发展, 机器人技术进入了一个新的发展阶段,机器人进入工业生产的实用化时代。最具代表性的机器人是美国Unimation 公司的PUMA 系列工业机器人和日本山梨大学牧野洋研制的SCARA机器人。到了20世纪80 年代, 机器人开始大量在汽车、电子等行业中使用, 从而推动了机器人产业的发展。机器人的研究开发, 无论水平和规模都得到迅速发展,工业机器人进入普及时代。然而, 到了20 世纪80 年代后期, 由于工业机器人的应用没有得到充分的挖掘, 不少机器人厂家倒闭, 机器人的研究跌入低谷。
20世纪90 年代中后期, 机器人产业出现复苏。世界机器人数量以较快增长率逐年增加, 并以较好的发展势头进入21 世纪。近年来,机器人产业发展迅猛。据国际机器人联合会(IFR) 数据, 2014 年全球新装机器人10 万台, 比2013 年增加了43%, 世界工业机器人的市场前景看好。
目前,世界上机器人无论是从技术水平上, 还是从已装备的数量上来看, 优势都集中在以欧美日为代表的国家和地区。但是, 随着中国等新兴国家的发展,世界机器人的发展和需求格局正在发生变化。
美国是最早研发机器人的国家,也是机器人应用最广泛的国家之一。近年来, 美国为了强化其产业在全球的市场份额以及保护美国国内制造业持续增长的趋势, 一方面鼓励工业界发展和应用机器人,另一方面制订计划, 增加机器人科研经费, 把机器人看成美国再次工业化的象征,迅速发展机器人产业。美国的机器人发展道路虽然有些曲折,但是其在性能可靠性、机器人语言、智能技术等方面一直都处于领先水平。
日本的机器人产业虽然发展晚于美国,但是日本善于引进与消化国外的先进技术。自1967 年日本川崎重工业公司率先从美国引进工业机器人技术后,日本政府在技术、政策和经济上都采取措施加以扶持。日本的工业机器人迅速走出了试验应用阶段, 并进入到成熟产品大量应用的阶段, 20 世纪80年代就在汽车与电子等行业大量使用工业机器人, 实现工业机器人的普及。


MOTOMAN-DA20 MOTOMAN-IA20

2010 年意大利柯马(COMAU)推出 SMART5 PAL 机器人,可实现装载 / 卸载 、多产品拾取、堆垛等。

KUKA 公司推出KR 5arc HW ( HollowWrist ),其机械臂和机械手上有一个50 mm 宽的通孔,可以保护机械臂上的整套保护气体软管的敷设。

FANUC 推出的 Robot M-3iA 装配机器人采用四轴或六轴模式,具有独特的平 行连接结构,具备轻巧便携的特点,承重范围可达6 kg 。
德国引进机器人的时间比较晚,但是由于战争导致劳动力短缺以及国民的技术水平比较高等因素, 促进了其工业机器人的快速发展。20 世纪70 年代德国就开始了“机器换人” 的过程。同时,德国政府通过长期资助和产学研结合扶植了一批机器人产业和人才梯队, 如德系机器人厂商KUKA 机器人公司。随着德国工业迈向以智能生产为代表的“工业4.0”时代, 德国企业对工业机器人的需求将继续增加。
我国工业机器人的起步比较晚,开始于20 世纪70 年代, 大体可以分为四个阶段, 即理论研究阶段、样机研发阶段、示范应用阶段和产业化阶段。理论研究阶段开始于20 世纪70 年代至80年代初期。这一阶段主要由高校对机器人基础理论进行研究, 在机器人机构学、运动学、动力学、控制理论等方面均取得了可喜进展。样机研发阶段开始于20 世纪80年代中期。随着工业机器人在发达国家的大量使用和普及, 我国工业机器人的研究得到政府的重视与支持, 机器人步入了跨越式发展时期。1986 年,我国开展了“七五”机器人攻关计划。
1987年, “863”高技术发展计划将机器人方面的研究开发列入其中,进行了工业机器人基础技术、基础元器件、几类工业机器人整机及应用工程的开发研究。在完成了示教再现式工业机器人及其成套技术的开发后,又研制出了喷涂、弧焊、点焊和搬运等作业机器人整机, 几类专用和通用控制系统及关键元器件, 其性能指标达到了20 世纪80 年代初国外同类产品的水平。20世纪90 年代是工业机器人示范应用阶段。为了促进高技术发展与国民经济发展的密切衔接, 国家确定了特种机器人与工业机器人及其应用工程并重、以应用带动关键技术和基础研究的发展方针。
这一阶段共研制出7种工业机器人系列产品, 并实施了100 余项机器人应用工程。同时, 为了促进国产机器人的产业化, 到20 世纪90 年代末期建立了9 个机器人产业化基地和7个科研基地。进入21 世纪, 我国工业机器人进入了产业化阶段。在这一阶段先后涌现出以新松机器人为代表的多家从事工业机器人生产的企业,自主研制了多种工业机器人系列, 并成功应用于汽车点焊、货物搬运等任务。经过40 多年的发展, 我国在工业机器人基础技术和工程应用上取得了快速的发展,基本奠定了独立自主发展机器人产业的基础。
机器人技术的发展,一方面表现在机器人应用领域的扩大和机器人种类的增多, 另一方面表现在机器人的智能化趋势。进入21 世纪以来,各个国家在机器人的智能化和拟人智能机器人上投入了大量的人力和财力。从近几年国际上知名企业推出和正在研制的产品来看, 新一代工业机器人正在向智能化、柔性化、网络化、人性化和编程图形化方向发展。

